


 スピードチャンピオン ケーニグセグ ジェスコ")


 ~車体の下地塗装~")
2021/07/11

~おりくらしげるのブログ~
今回は久しぶりにマークIVの作成を更新しようと思います!やろうやろうと思っていたのですが、他のことばかりやって更新出来てませんでした。その結果前回の更新から1ヶ月以上経過してしまいました。
罪悪感はありますが反省はしていません!今回も張り切って行こうと思います!
今までさり気なく「モータードライバー」という言葉を使ってきましたが、ここにきて改めてモータードライバーについて説明をしようと思います。
Raspberry Pi Zero(以下ラズパイ)でマークⅣのモーターを制御する際には「モータードライバー」と呼ばれる装置をラズパイとモーターの間に取り付ける必要があります。
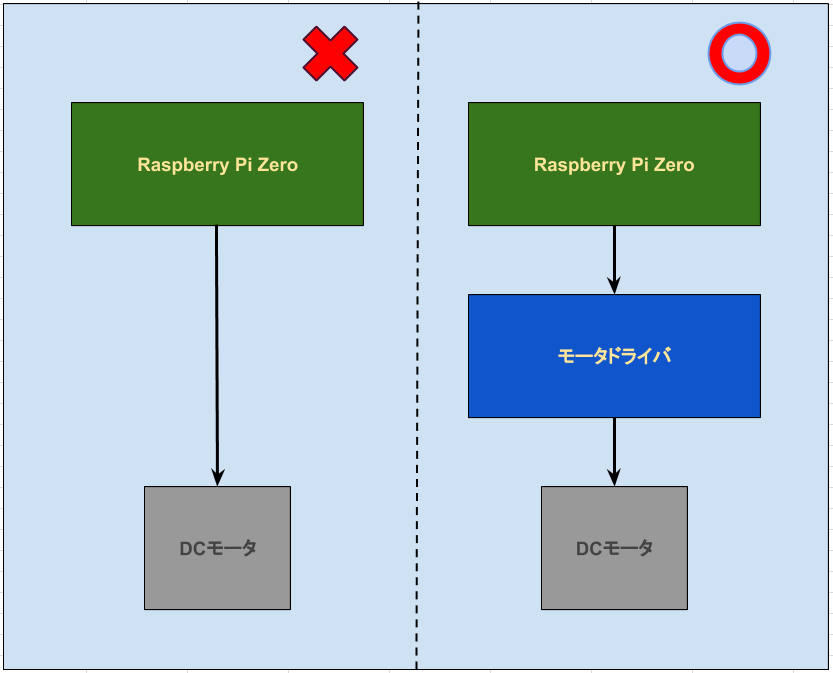
「モータードライバーなんて使わずにラズパイのGPIOを直接モーターに繋げば良いじゃん」と思う人もいるかも知れません。確かに、ラズパイのGPIOも少ない電流を流す事はできるので、モーターを回すこともできるのですが、以下の問題があります。
・出力できる電流が少ないため、モーターに対して十分な電流を流せない
・モーターが外部からの影響で回転してしまった時に、起電力が発生して、ラズパイのGPIOに予期せぬ電流が流れる可能性がある
などが挙げられると思います(他にもあるかも)。なので、マイコンからモーターを制御する際はモータードライバーは必須になるわけですね!
サーボモーターとは出力軸の位置と速度を制御できるモーターのことです。前回のブログで使っていたDCモーターとは異なり、回転ではなく角度の制御を行うことが出来ます。ラジコンでの使用用途では、車のステアリングや飛行機のラダーやエレベーター等に用いられることが多いです。角度を指定することが出来るので、戦車では砲塔の上下や、砲塔旋回装置に用いると便利です。
前回のブログでマークⅣに装置を一式入れてみたところ、かなり空間に余裕がありそうだったので、サーボモーターを導入して左右の砲旋回に挑戦したいと思います!
先に述べたように、サーボモーターは出力軸の位置と速度を制御するための制御用の信号が必要になります。その制御用の信号にはPWM(Pulse Width Modulation)を用います。これは、高速でON/OFFを繰り返し、そのON時間の長さ(デューティ比)によってモーターを制御するものです。PWMについては、「PWM」で画像検索するとわかりやすい説明をしているサイトがいくつも出てくるため、興味のある方はそちらを参照するのが良いかと思います。
ラズパイはPWM制御できる機構が備わっていますので、サーボモーターに電源とラズパイはPWM端子に接続するとモータードライバーを追加しなくても簡単に制御することが出来ます。しかし、ラズパイでPWM制御できるピンには限りがあるので、今回は別途PWMドライバを用意することにしました。
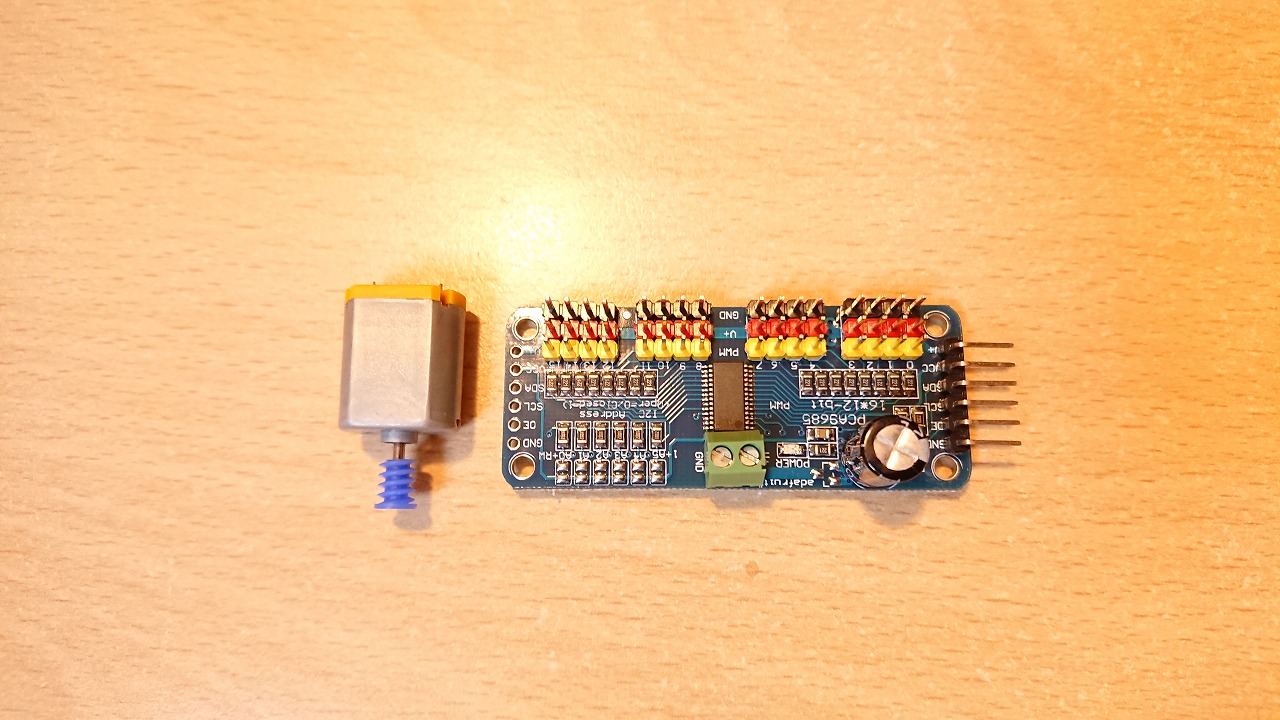
PWMドライバーにはAmazonで売っていた「HiLetgo PCA9685」を使おうと思います。Amazonではモータードライバとして販売されていますが、このドライバに用いられているICのデータシートを確認すると、LED制御用のPWMドライバであることがわかります。PWM制御さえできれば問題ないので、このまま使おうと思います!

※画像は2018/10/14時点の価格です。
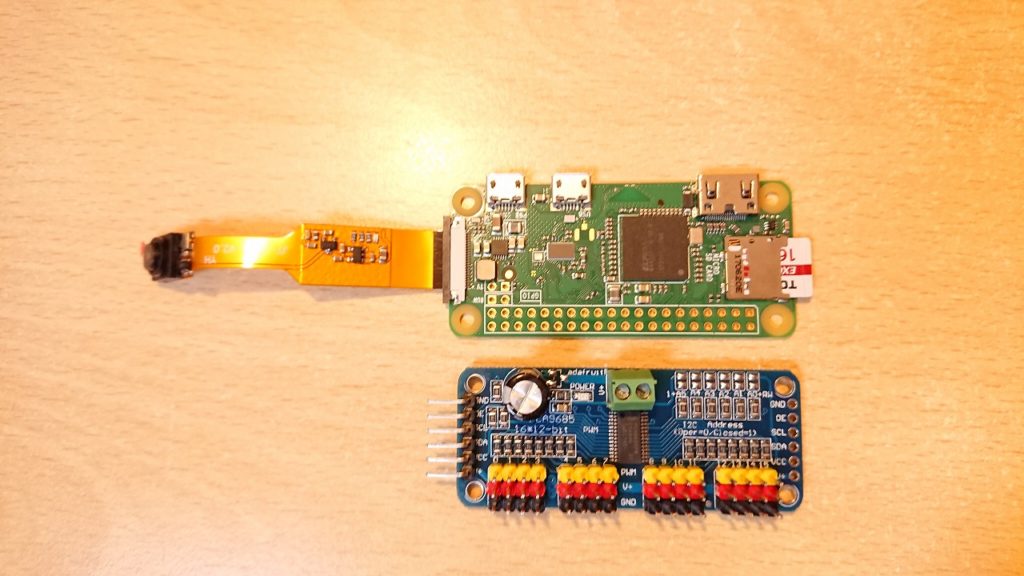
実際に届いたHiLetgo PCA9685です。ラズパイと同じくらいの基盤サイズです。
サーボモーターもAmazonで売っているものを選びました。「XCSOURCE 一般マイクロサーボ RC450」を使おうと思います。
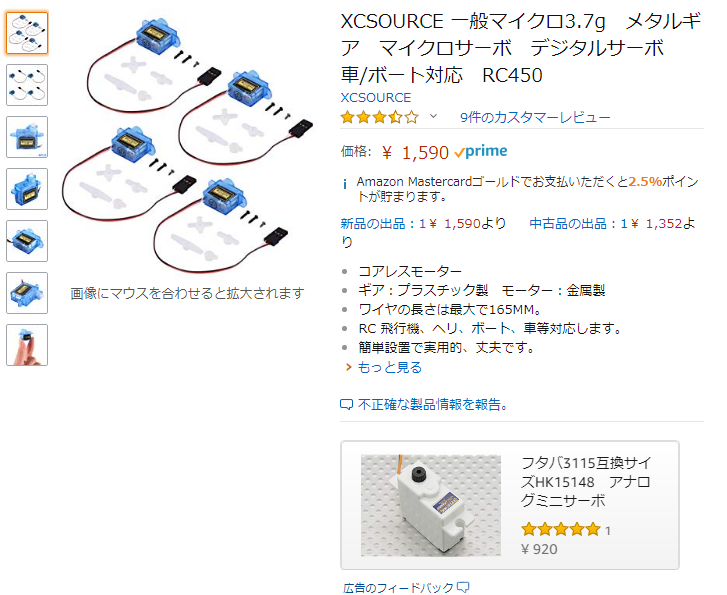
※画像は2018/10/14時点の価格です。

実際に届いたマイクロサーボ RC450です。マークIVの走行用モーターと同じくらいのサイズで、かなりコンパクトです。
モータードライバーには秋月電子通商で販売している「TPC8407×2モジュール MP4212ピン互換 パワーMOSFETモジュール」を使おうと思います。これは商品説明にある通り、MP4212というモータードライバとピン配置に互換性があります。
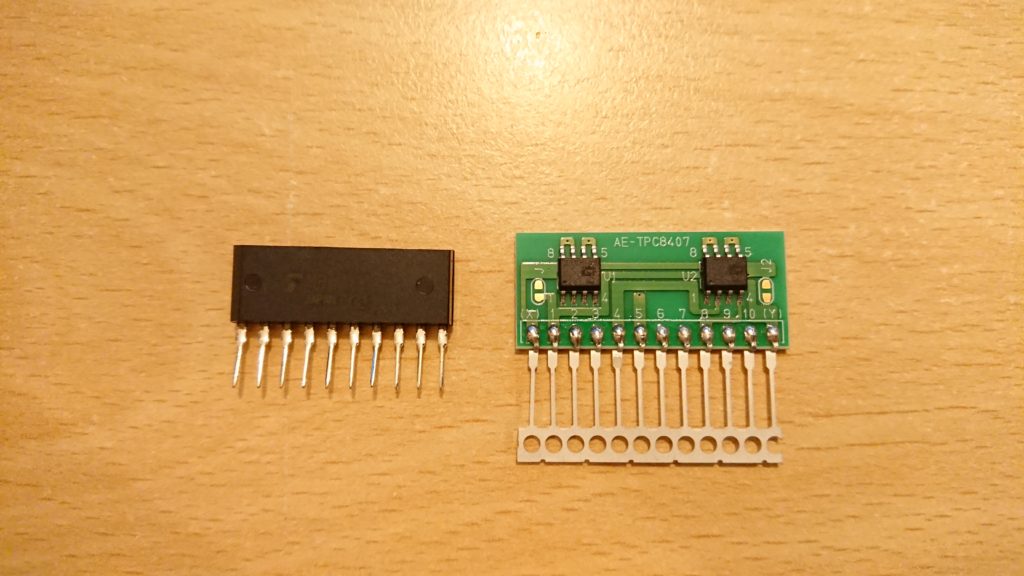
※左がMP4212。右が今回購入したTPC8407×2モジュール
MP4212は昔からよく使われるモータードライバで、小型ロボットのDCモーターを制御するときなどによく用いられています。
今回のマークⅣに使うモータドライバーとラズパイの接続は以下の構成図のようになります。
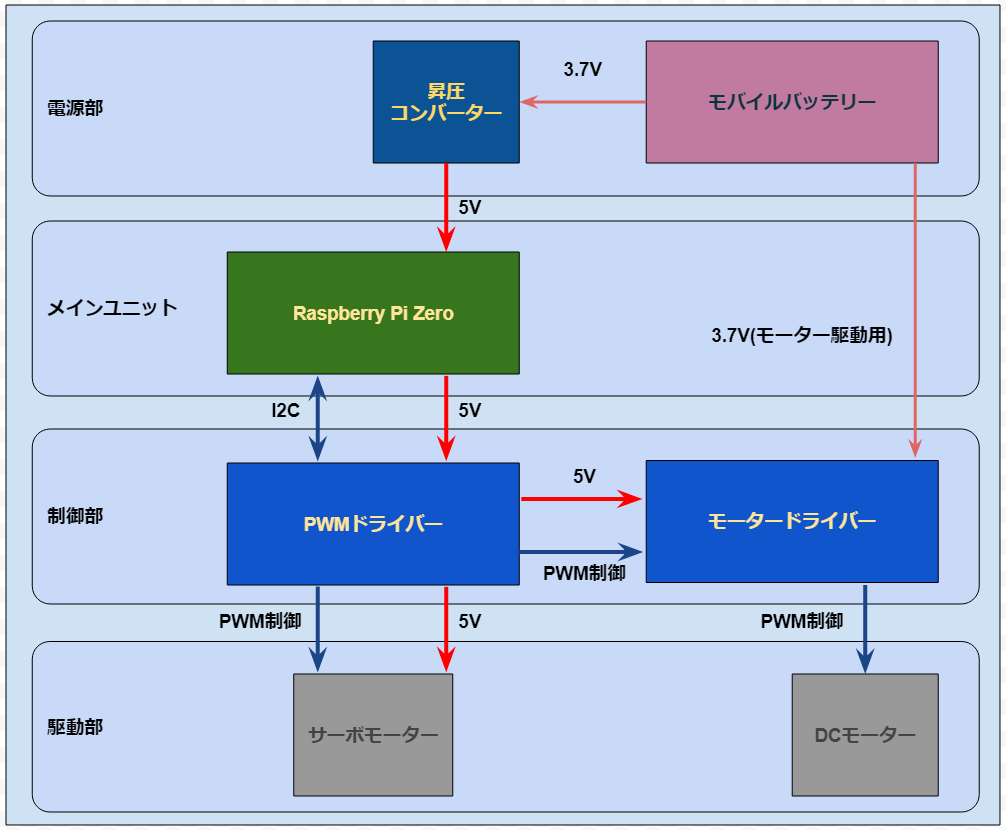
図がわかり辛くてすみません。この手の構成図とかシーケンス図とか描くの苦手なのです。。。
ここで肝になるのが、「モータドライバー」のところですね。今回使うDCモーターは適正駆動電圧が3.0Vです。わざわざ5.0Vに昇圧された電源で3.0V制御するより、モバイルバッテリーのセルから直接3.7Vを使って3.0V制御した方がスマートな気がしたので、図のような経路になっています。
また、今回使用するPWMドライバーはI2C接続ができて、かつ16チャンネルものデバイスを制御できるため、PWMで制御するものは全てこのドライバーに管理してもらうことにしました。
もし、モータドライバーとPWMドライバーを直接ラズパイに繋いで制御した場合、ラズパイはモータードライバー制御用プログラムとPWMドライバー制御用プログラムの2つを実装しなくてはならず、配線もGPIOのデジタル出力とI2Cの2系統を実装しなくてはならないため、ケーブルが無駄に増えてしまいます。
上図のように、PWMドライバーに全ての制御を任せると、ラズパイからの配線はI2Cだけになり、ラズパイで実行するソフトウェアも1つだけで済むので無駄がありません。
今回はモーター周辺装置についての考察回でした。マークⅣの記事は進みが遅いですが、私のブログのネタの大黒柱なので着実に進めて行こうと思います。たとえ完成に何年かかろうとも!(でも今年中には動かせるところまで持っていきたい)。
とは言いつつも最近仕事が忙しいということもあるのでマイペースで進めていこうと思います~。ではでは~。
・続き↓
・前回↓
タミヤ 1/35 マークIV カメラ付きラジコン化計画 (その10) ~ダブルモーター化~
・一覧↓
カメラ付きラジコン化計画シリーズ
more
2021/07/11
 ~砲塔の制御~")
2021/05/04
more
 豊平")
2026/05/11

2026/04/25

2026/04/18
more
more

2026/05/12
![[Chitubox]サポート材の自動設定で3Dプリンタの高さ制限超えた時の対処法](https://shigeru-orikura.com/wp-content/uploads/2026/05/chitubox_005sd-blogsize-150x150.jpg "[Chitubox]サポート材の自動設定で3Dプリンタの高さ制限超えた時の対処法")
2026/05/03

2026/04/26
 ~サーボモータの追加~")
~主砲部分や前照灯の作成~")
~ドライブホイールの作成~")
~車高調整と車体作成~")
 シティ オフロード消防車 60393 を作ってみた")
 スピードチャンピオン ケーニグセグ ジェスコ 76900 を作ってみた(その2)")
 スピードチャンピオン ケーニグセグ ジェスコ 76900 を作ってみた(その1)")



