
 ~動力部の作成~")
 ~足回りの作成~")
1/35スケール超重戦車 オイ車とVk.168.01(P)とタイプ205 「モイスヒェン」 超重戦車")
")

 ~車体の下地塗装~")
2021/07/11

~おりくらしげるのブログ~
今回も前回に引き続き、アミュージングホビー 1/35 ARL44を作っていこうと思います!
今回もいきなりタイトル詐欺でごめんなさいw。前回も少し記載したのですが、当初はPWMドライバを砲塔に配置しようと考えていました。というか砲塔と車体にそれぞれPWMドライバを配置しようと考えていました。
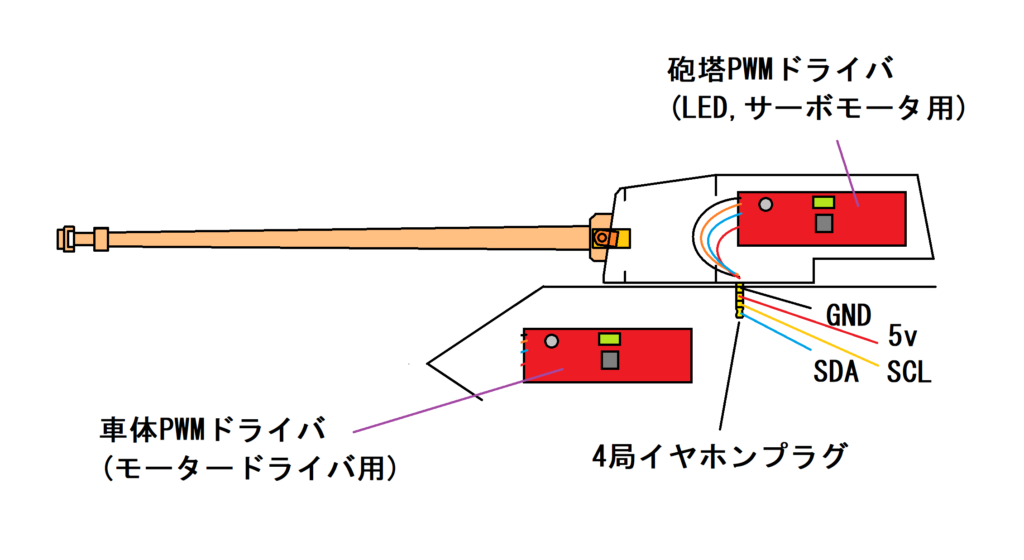
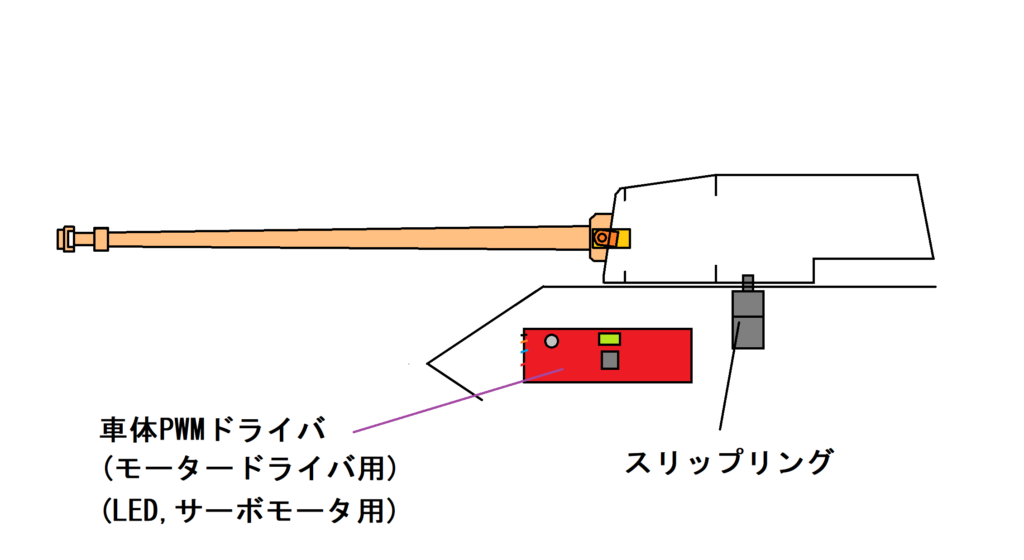
画像の通り当初スリップリングを4極イヤホンジャックで代用し、配線を4本で済ませようとしていたのですが、途中で9線のスリップリングを購入したのでPWMドライバは車体だけに収める事にしました。
↓↓↓↓↓↓↓↓↓↓↓↓↓↓
そもそもI2Cは同じ基盤内など短い距離間での通信しか想定していないので、上の図のような設計のやり方は、I2Cの思想からかけ離れていました。その上、I2Cはバス線がプルアップされているので、スリップリングが一時接触不良を起こした場合にデータが不正になる可能性があったので、まともに動かなかった可能性もあります。
いずれにしても、今回のARL44のPWM信号は合計9chだけなのに16chのPWMドライバを2つ乗せるのは設計として気持ち悪かったので修正できて良かったですw
前回リューターを使ってPWMドライバの基板を削り、サイズを小さくしていました。
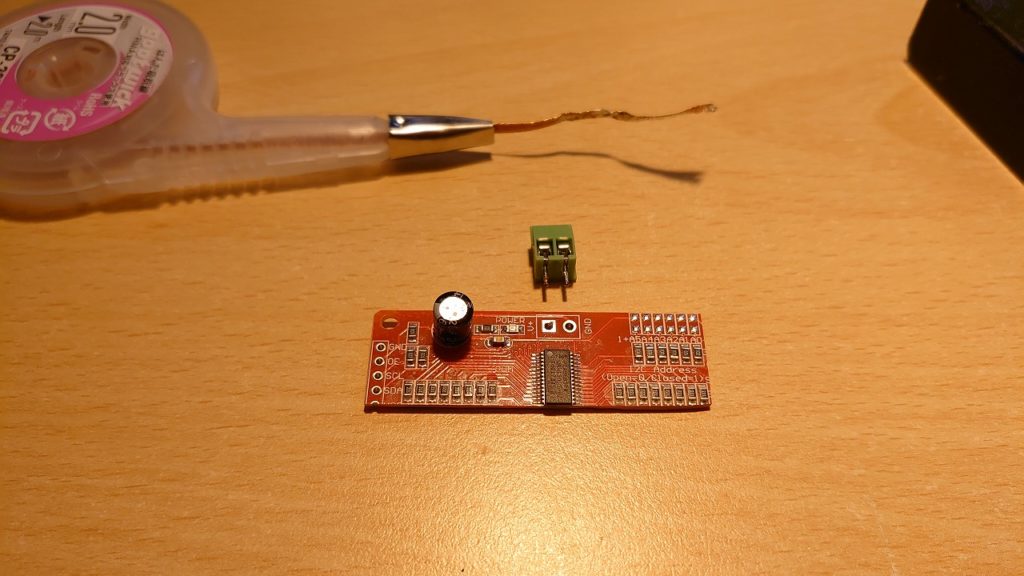
その際、サーボモータ用のピンヘッダも切り落としたのですが、以下のように配線すれば問題ないはずです。
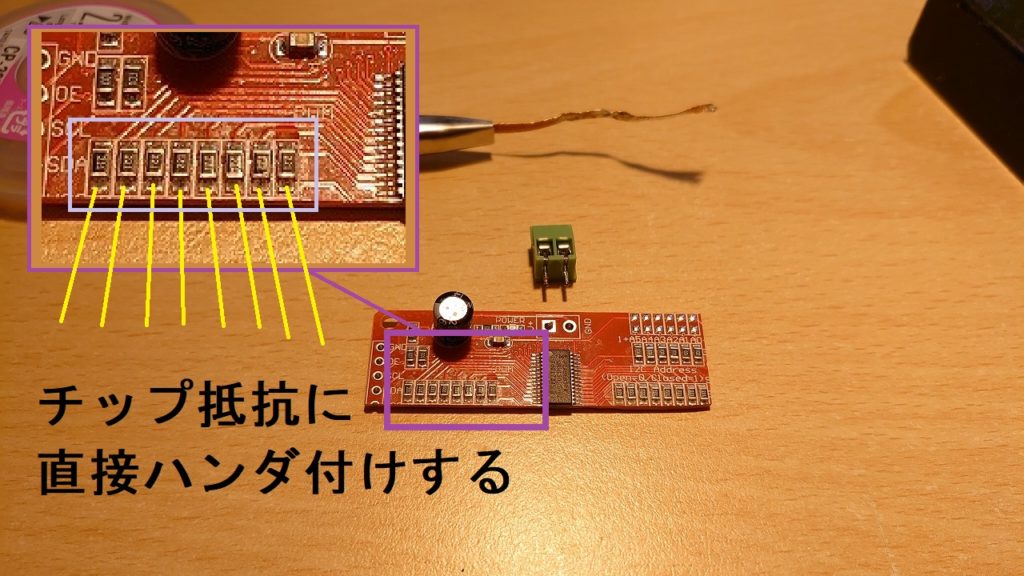
PWMドライバからPWM信号の部分と電源(5vとGND)を直接配線すればokです(配線する位置が変わっただけでピンヘッダにつなぐのと同じ状態です)。今回はPWMドライバ側の配線があまり進まなかったので、また追って記事にする予定です。
今回ARL44を動かすメインユニットはRaspberry Pi Zero WHを使います(今更感)。

とりあえずMarkⅣで動作させる部分までは確認出来ているので、内部装置は同じような構成で作ろうと思っています。ちなみにスイッチサイエンスでRaspberry Pi Zero Wを購入できるのは一人一つまでです。Raspberry Pi Zero WはMarkⅣで既に使ってしまっているので、今回はピンヘッダ付きのRaspberry Pi Zero WHを購入しました。※詳しい違いについてはこちらを参照してください。

Raspberry Pi Zero WHを車体に乗せる必要があります。PWMドライバも同じ基盤サイズの物を削り小さくなったので、二段ベッドのように重ねてみようと思います!
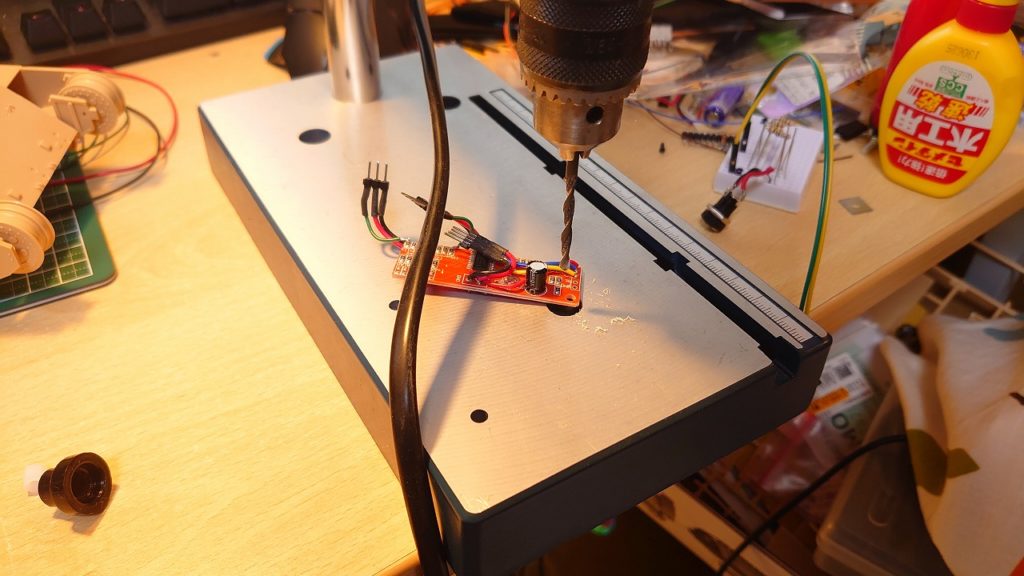
まずPWMドライバの穴がネジの大きさとほぼ同じで、ISO_M3ネジ(3.0mm)がギリギリ入らなかったので少し広げます。
で、スペーサーをかませて取り付けました!良い感じですね!(また、途中画像を撮り忘れてしまったw)
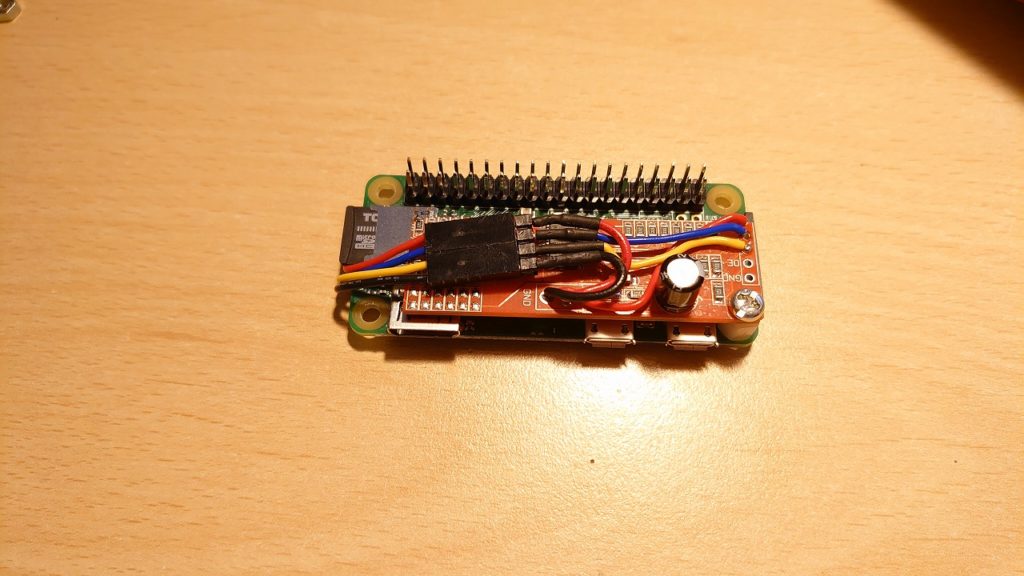
こちらは上から見た図です。PWMドライバからの配線は4ピンのピンソケットで接続しています。Raspberry Pi Zero WHとPWMドライバは樹脂製の六角スペーサー(高さ5mm)で一カ所だけ止めてあります。
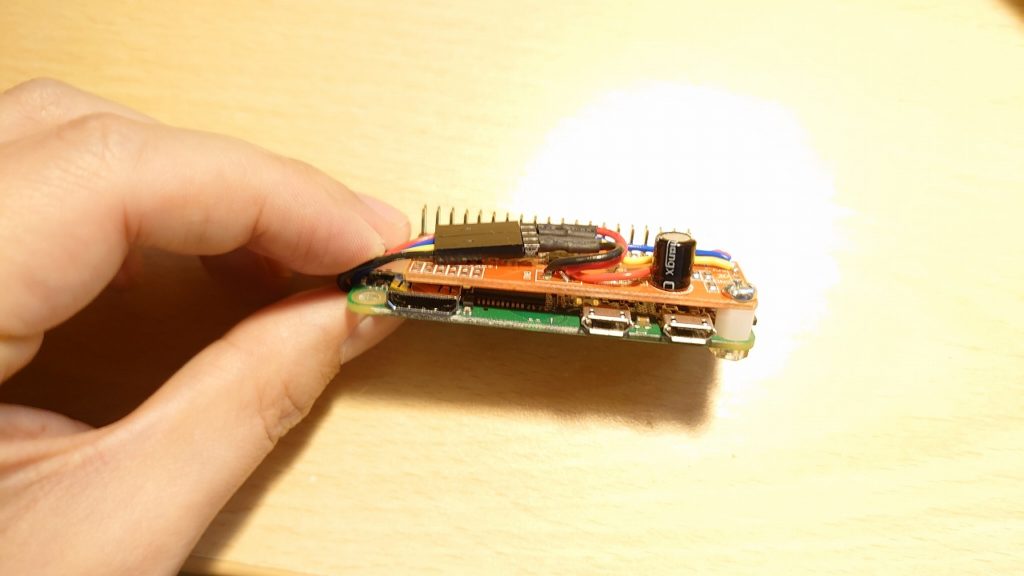
厚さもそんなにありません。PWMドライバのコンデンサと土台のスペーサーを合わせても15mm程度です。
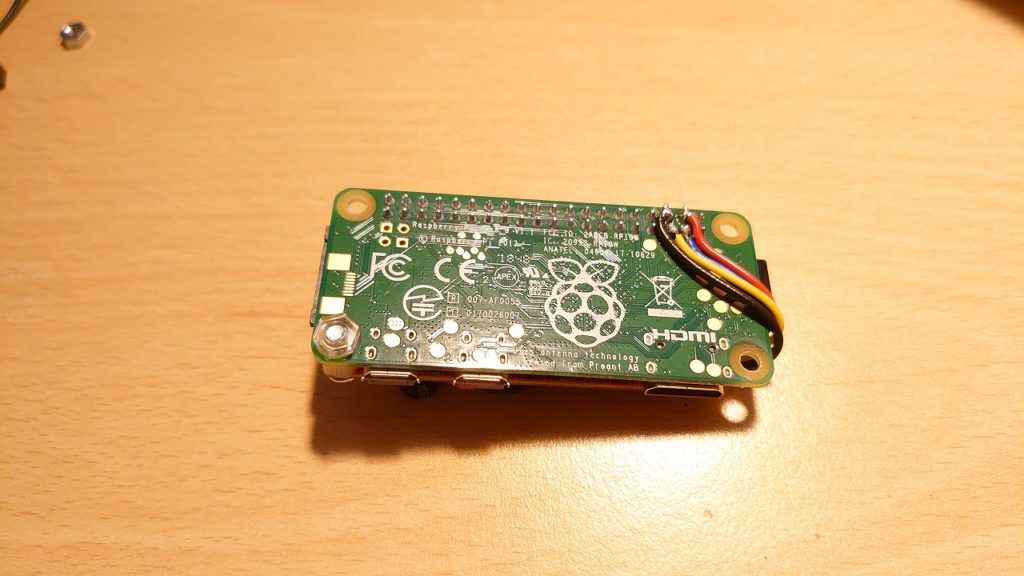
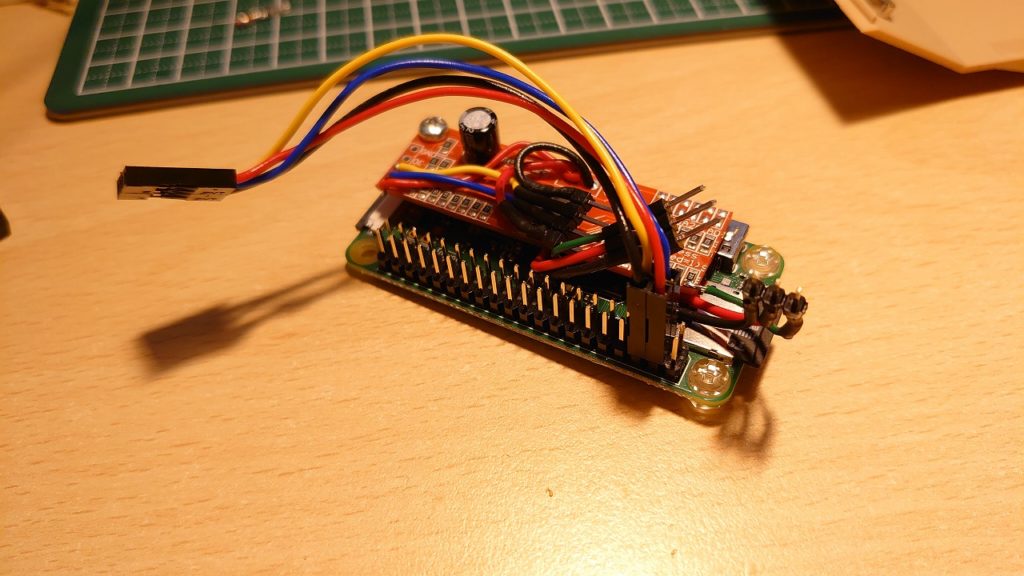
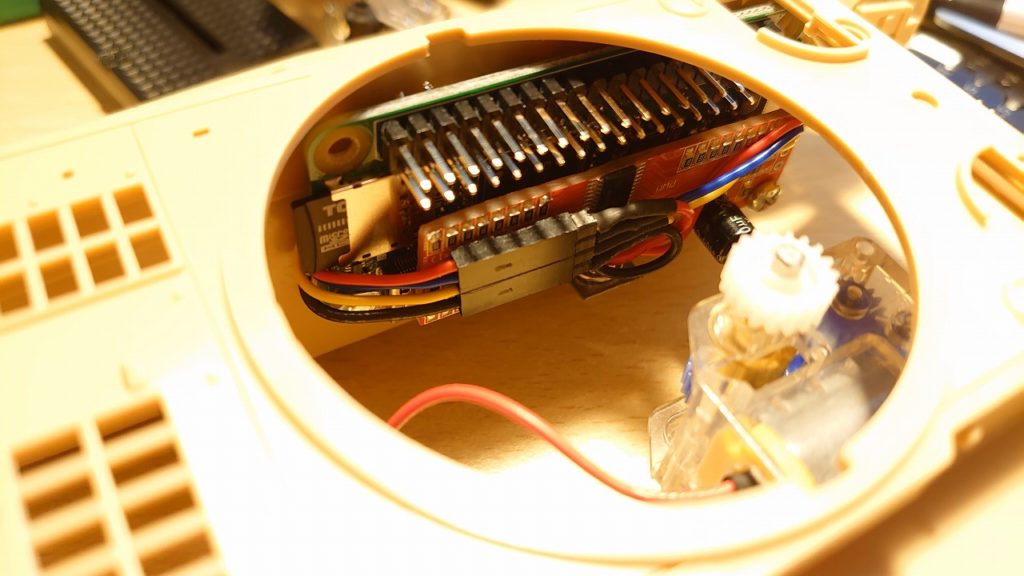
裏はこんな感じです!Raspberry Pi Zero WHからPWMドライバまでのI2C接続は、上に出ているピンヘッダからではなく、ピンヘッダが接続されている裏側に直接ハンダ付けしました。
I2Cの配線はSDカード側の脇を通ってPWMドライバへつながります。
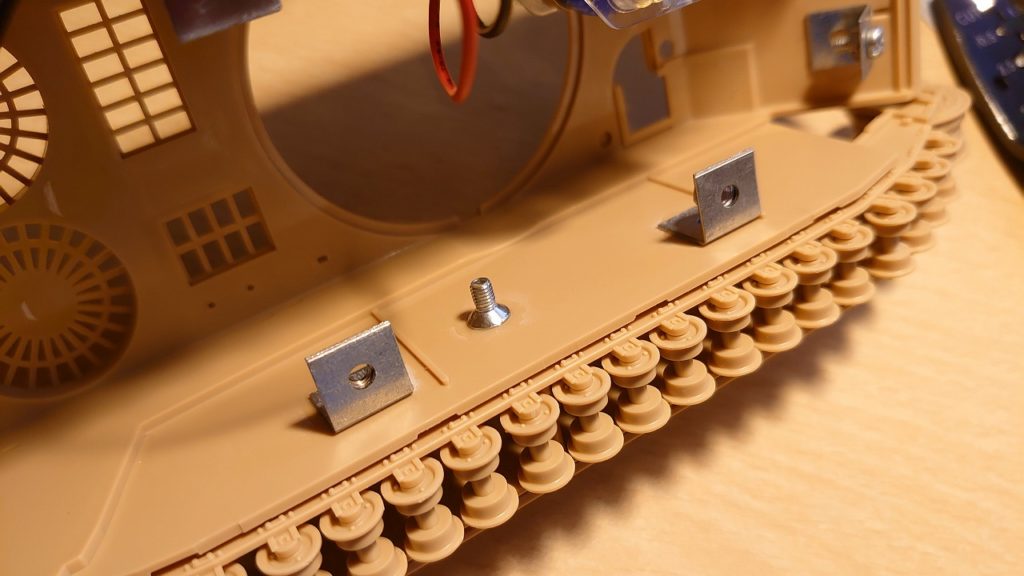
車体の下の方に皿ネジを接着剤て接着し、取り付けポイントを作成しました。
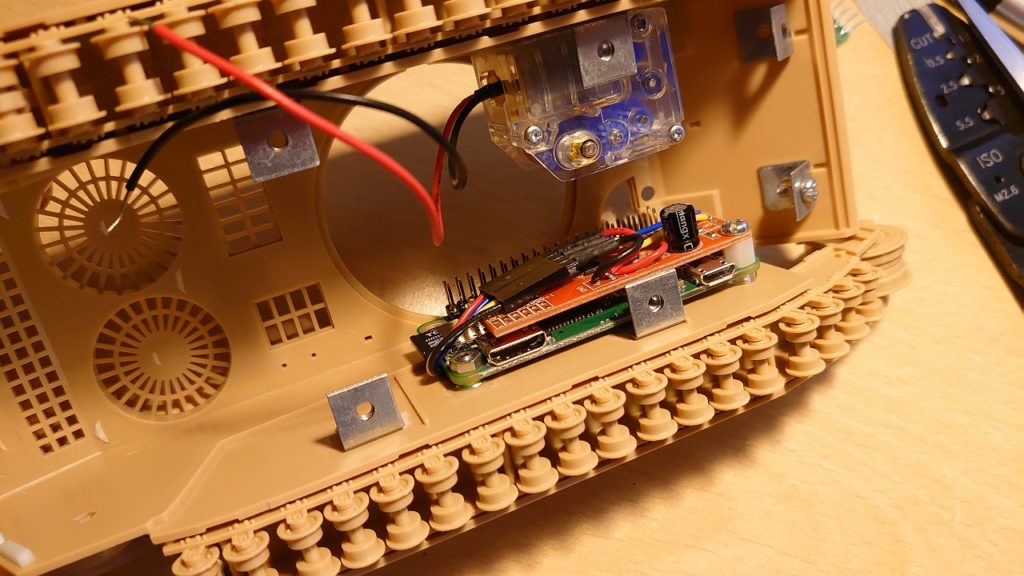
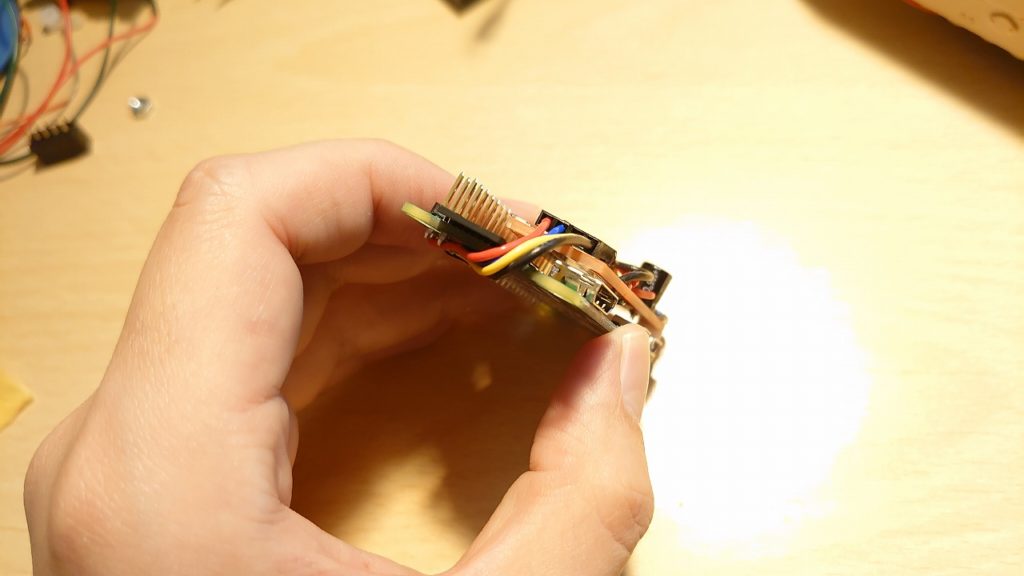
こんな感じでRaspberry Pi Zero WHとPWMドライバのセットを取り付けました。結構コンパクトに収まっています!
上から見た図。中々よさげです!以前位置下げしたギヤにピンヘッダがギリギリ干渉しないくらいの位置なんですよw。買えないので仕方ありませんが、ピンヘッダ無し版のRaspberry Pi Zero Wを使った方が良さそうですねw
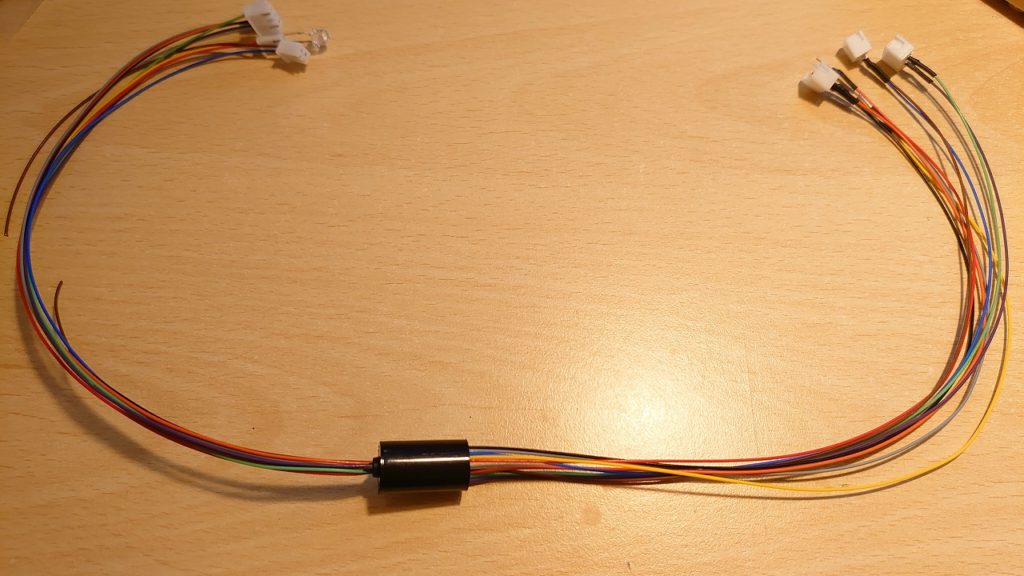
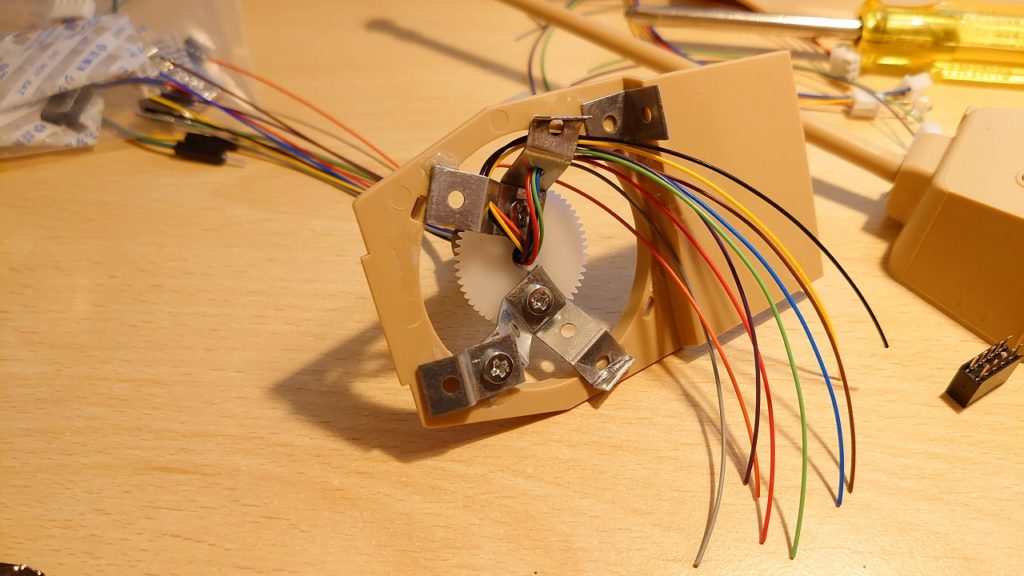
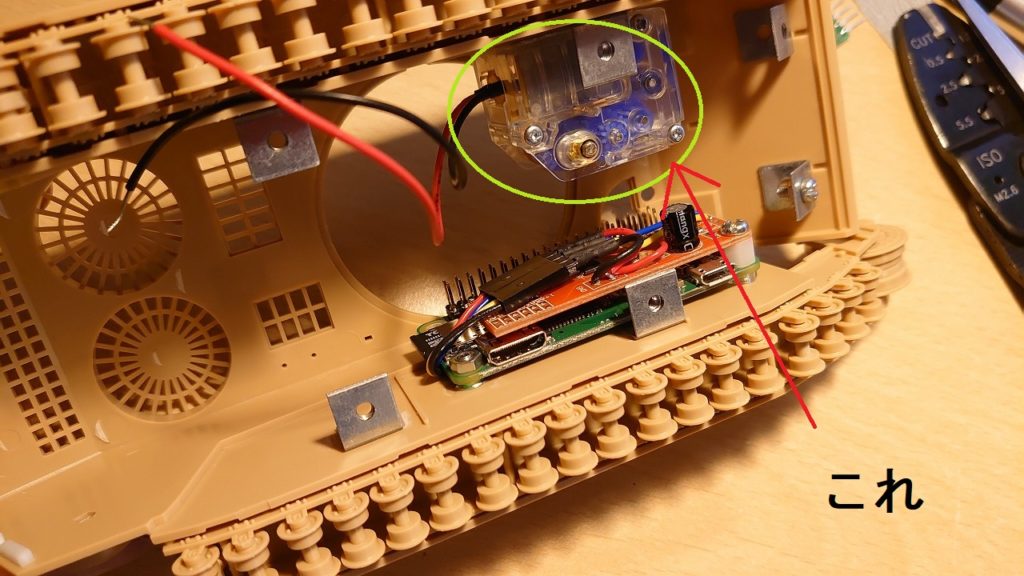
こちらの記事でも書きましたが、スリップリングが届きました!なので早速車体に取り付けて行こうと思います。
取り付け位置は砲塔旋回用のギヤの中心です。ちょうど穴を開けておいたので、こちらに瞬間接着剤で接着しようと思います。
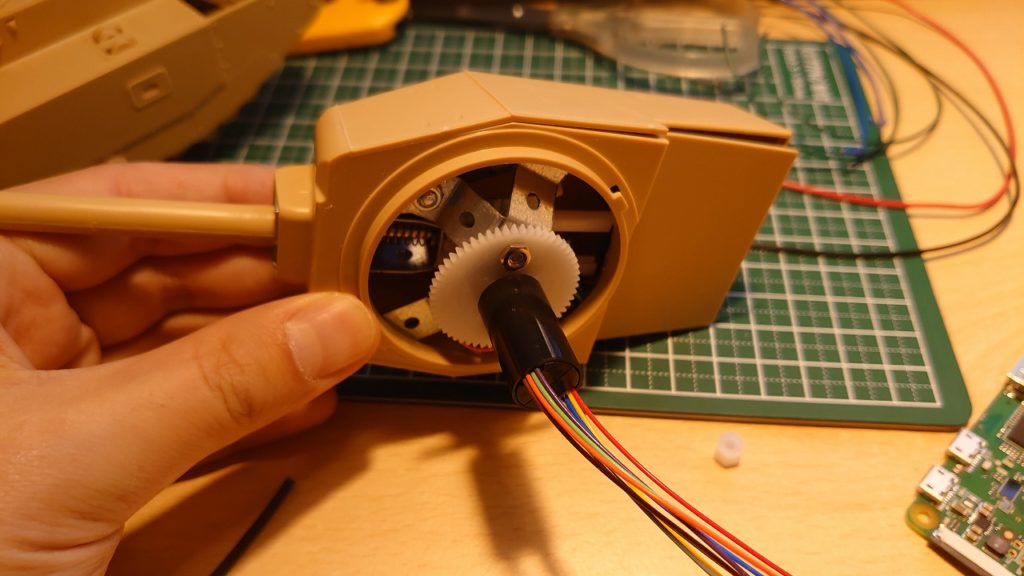
こんな感じになりました!良さげ!でもこのままだと「毛」が汚いので、綺麗にしていこうと思います。
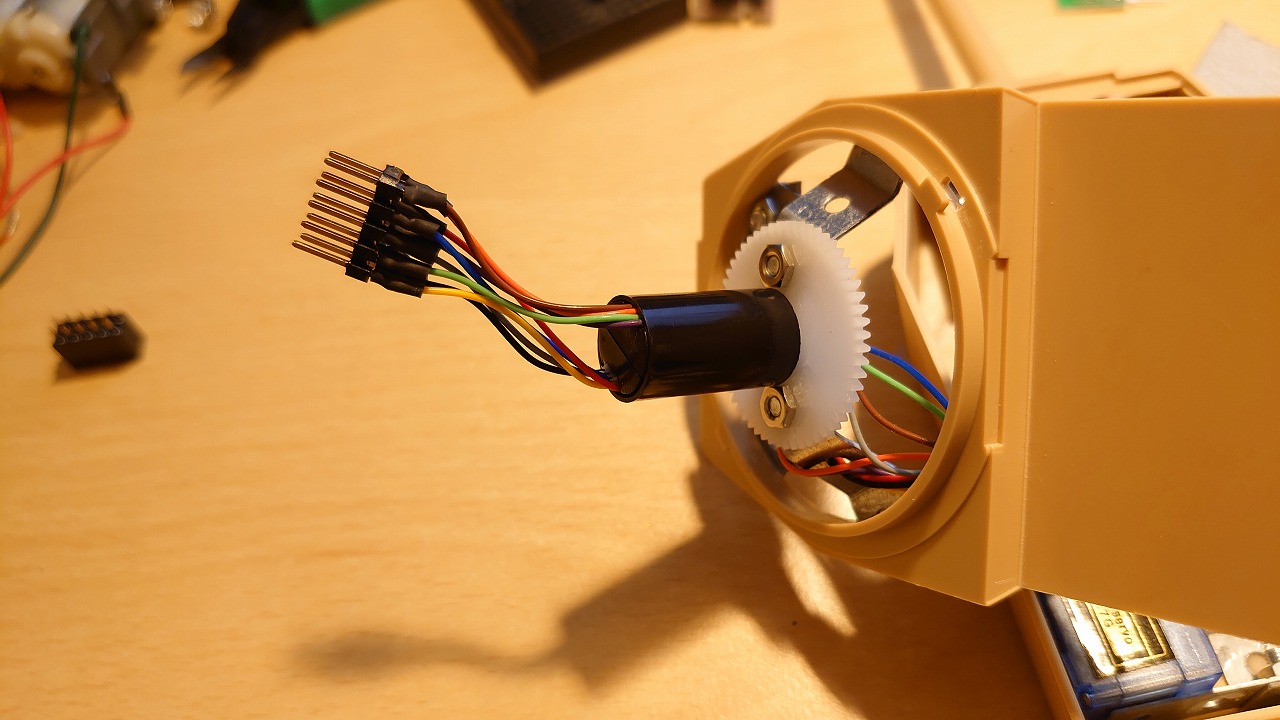
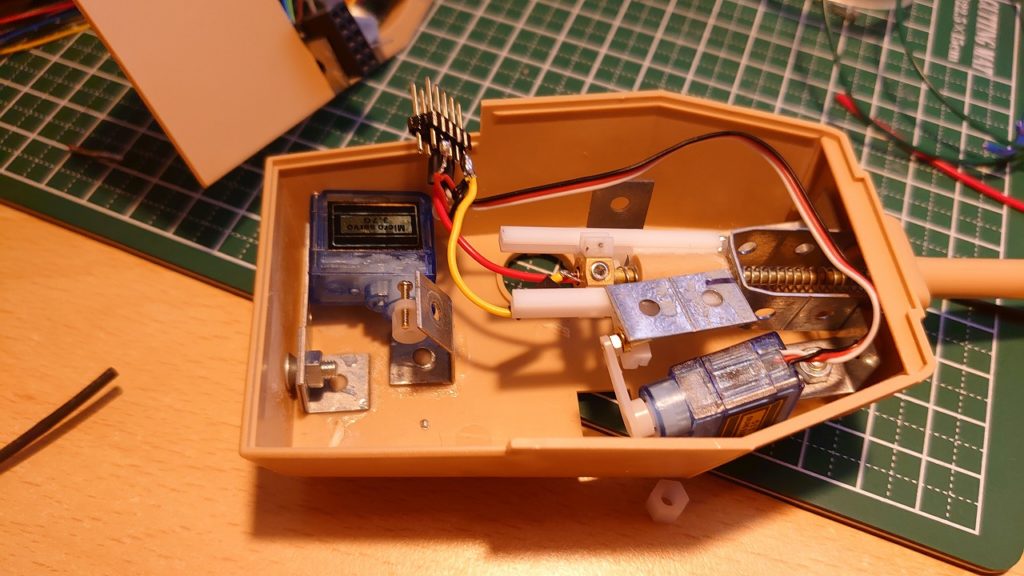
砲塔に出ているスリップリングの配線をしていきます!
これらをダイレクトにサーボモータに接続しても良いのですが、そうするとメンテナンス性が下がってしまうので、コネクタを追加しました。
5×2のピンソケットに配線しました!ちなみに、砲塔にはLED,サーボモーター×2が搭載されており、必要な配線は5本です!
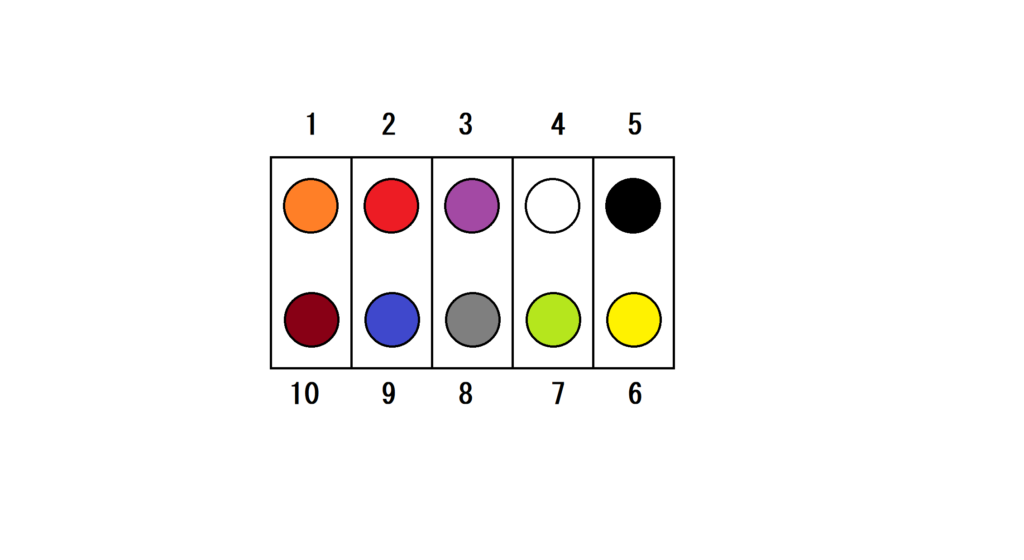
以下配線の内訳です(自分がやりやすいように適当に配線しましたwこの配置に特に深い意味はありません)。
| ピン | 内容 | 用途 |
|---|---|---|
| 1 | – | 予備 |
| 2 | 5v | サーボモーター用の共同電源 |
| 3 | – | 予備 |
| 4 | NC | 何も接続しない |
| 5 | GND | LED/サーボモーター1/2に接続する共同GND |
| 6 | PWM1 | LEDの+に接続するPWM信号 |
| 7 | PWM2 | サーボモーター1に接続するPWM信号 |
| 8 | PWM3 | サーボモーター2に接続するPWM信号 |
| 9 | – | 予備 |
| 10 | – | 予備 |
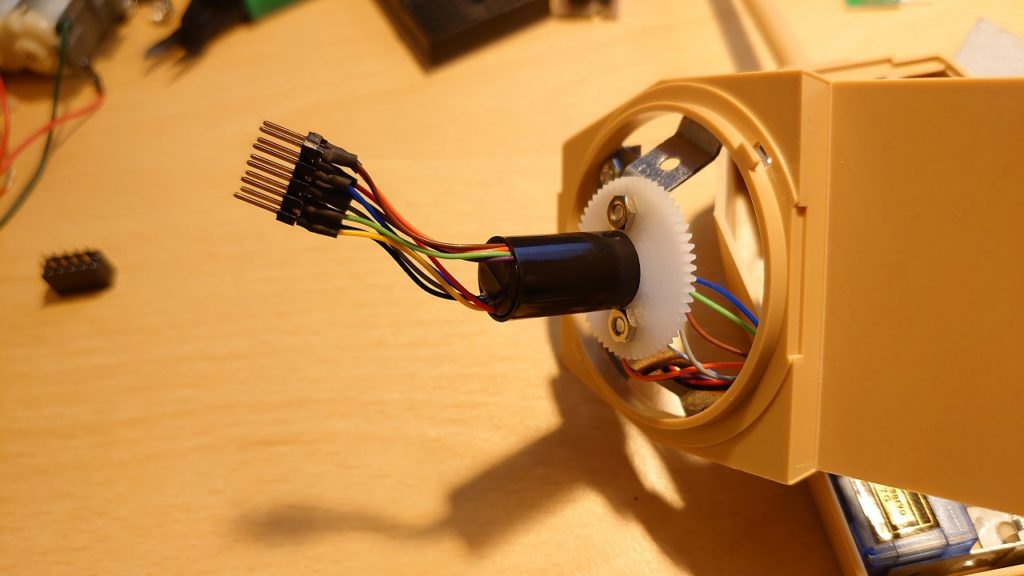
今回購入したスリップリングの配線は9線あり、そのうちの5線を使いました。残り4本は予備として残そうと思います。
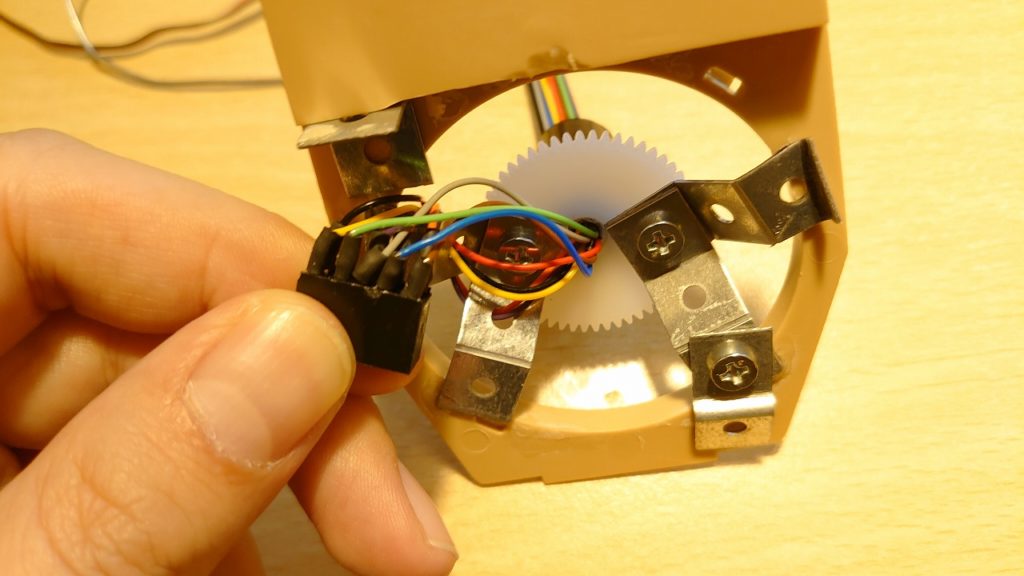
こんな感じで配線しました!※スリップリングのケーブルに使われている銅線の熱伝導率が高いのか、はんだ付けしている時やたらケーブルが熱くなりました。
先程の画像に沿って砲塔内のサーボモータやLEDに配線していきます。
↓↓↓↓↓↓↓↓↓↓↓↓↓↓
こんな感じです。
こんな感じです。見栄えはあまり良くないですが、配線はスッキリしました!
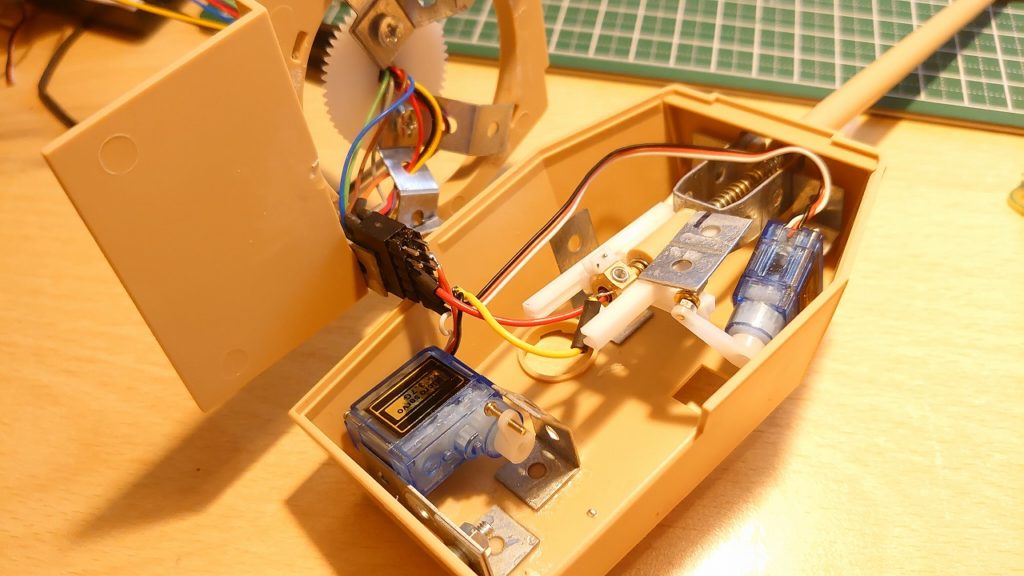
車体のスリップリングも砲塔と同様に配線していきます!

車体も砲塔を外した時にメンテナンスできるように、コネクタを用意します。
わからなくなりそうだったので、配線位置は砲塔のコネクタ同じにしました。ちなみにですが、コネクタのオス(ピンヘッダ)・メス(ピンソケット)どちらにするかについて、私なりのルールで決定しています。コンセントと同じように「電力を出す方がメス」、「電力を使う方がオス」です。電力出す方をオスにしてしまうと、何かしらの金属がコネクタに触れた時、ショートして回路を壊してしまう恐れがあるのでそうしています。ただ、Raspberry PiのGPIOピンの様に出力がオスになっている事もあるので、そんなに気にしなくても良いかも知れませんね。
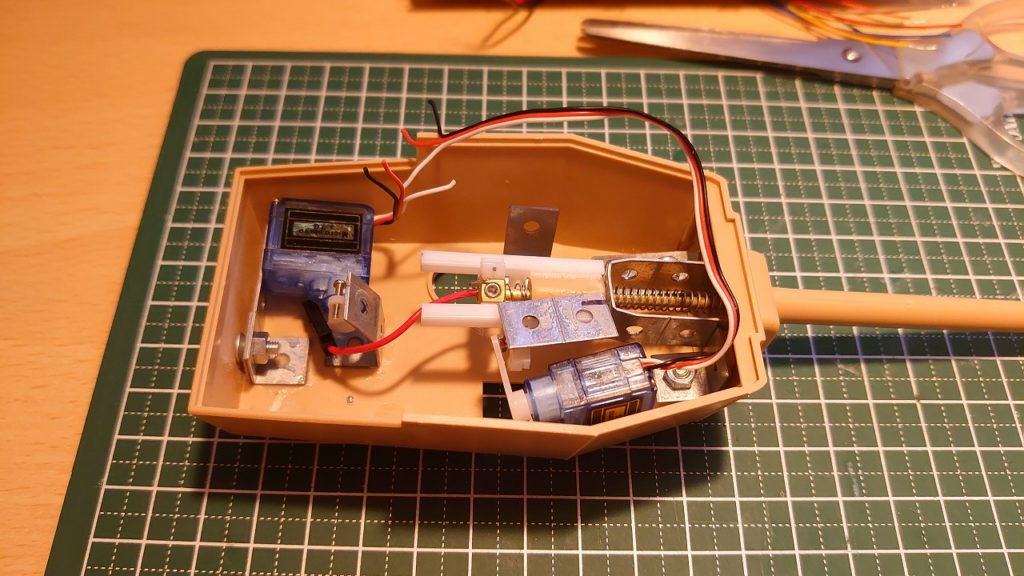
前回砲塔旋回用のギヤを位置下げしたのですが、それに合わせてギヤボックスの位置も下げました!
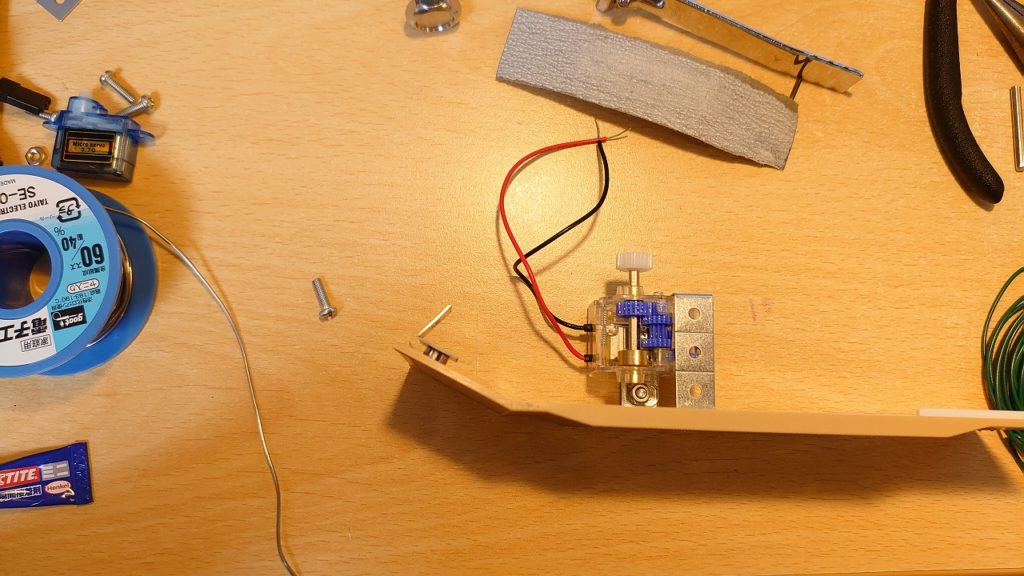
ちなみに、ARL44の砲塔旋回装置は元々、車体の下パーツに砲塔旋回装置を取り付けていました。今回位置下げに合わせて車体側面に付ける事にしました。
車体側面には出っ張りが何か所かあったので、1mm厚のプラバンを入れて高さを合わせて、そこに瞬間接着剤で接着剤しました!(「メンテナンス性」どこ行ったw)
最終的にはちゃんと砲塔が回るようになり、同時にスリップリングも問題なく動作していそうでした!
ARL44の砲塔リンクに1/16 RC tank用のスリップリング入れてみました!
車体からの給電が途絶える事なく砲身のLED光ってますね💡800円弱ですがこれは使えそうです!
※いつもより電圧高めに回っております
‹‹\(´ω)/››‹‹\( ´)/››‹‹\( ´ω)/›› pic.twitter.com/iLT4eoPFh6— おりくらしげる (@shigeruorikura) November 4, 2019
というわけ今回の記事は終わりです!ARL44の外側としてはあまり進捗がありませんが、内部装置としては結構形になってきたと思います!この調子で今月末までにある程度動くようにして、その後塗装などを含めて12月末とかに終わればなぁと考えているのですが、どうなるんでしょうねw。MarkⅣの前科があるのでなんとも言えませんw。
作業が進み次第またブログを更新しようと思います!ではでは〜
・続き↓
・前回↓
アミュージングホビー 1/35 ARL44 をラジコン化してみた(その6)~砲身の上下装置作成~
・一覧↓
アミュージングホビー 1/35 ARL44 をラジコン化してみたシリーズ
more
2021/07/11
 ~砲塔の制御~")
2021/05/04
more
 豊平")
2026/05/11

2026/04/25

2026/04/18
more
more

2026/05/12
![[Chitubox]サポート材の自動設定で3Dプリンタの高さ制限超えた時の対処法](https://shigeru-orikura.com/wp-content/uploads/2026/05/chitubox_005sd-blogsize-150x150.jpg "[Chitubox]サポート材の自動設定で3Dプリンタの高さ制限超えた時の対処法")
2026/05/03

2026/04/26
 ~サーボモータの追加~")
~主砲部分や前照灯の作成~")
~ドライブホイールの作成~")
~車高調整と車体作成~")
 シティ オフロード消防車 60393 を作ってみた")
 スピードチャンピオン ケーニグセグ ジェスコ 76900 を作ってみた(その2)")
 スピードチャンピオン ケーニグセグ ジェスコ 76900 を作ってみた(その1)")



