~砲身にLEDを搭載~")




 2021年 02 月号")
 ~車体の下地塗装~")
2021/07/11

~おりくらしげるのブログ~
今回も前回に引き続き、マークⅣを作って行こうと思います!
前回の後半に少し触れたのですが、左側の履帯が動かなくなってしまう問題が発生していました。なので、今回はそちらの原因調査からやって行こうと思います!
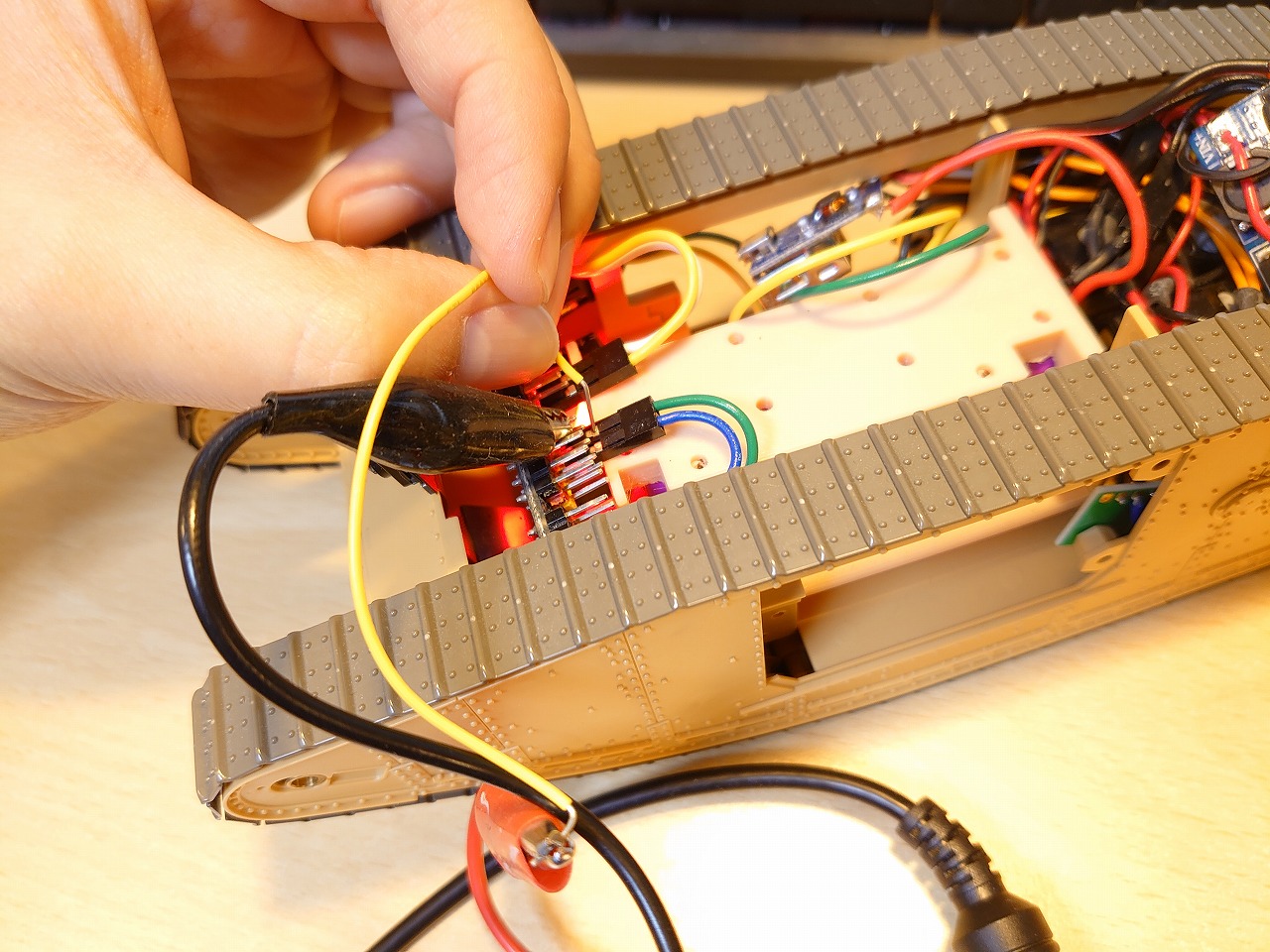
問題の切り分けをするために、まずPWMドライバーから見て行こうと思います。こちらからPWM信号が出ていなかったら、ここが原因だとわかります。
※無駄に超広角で撮影していくスタイル
xperia1は3連カメラになっているのですが、通常カメラ以外は使っていなかったので試してみました。多分、こんな近距離の物を撮る用ではないと思うのですが、面白いですね。

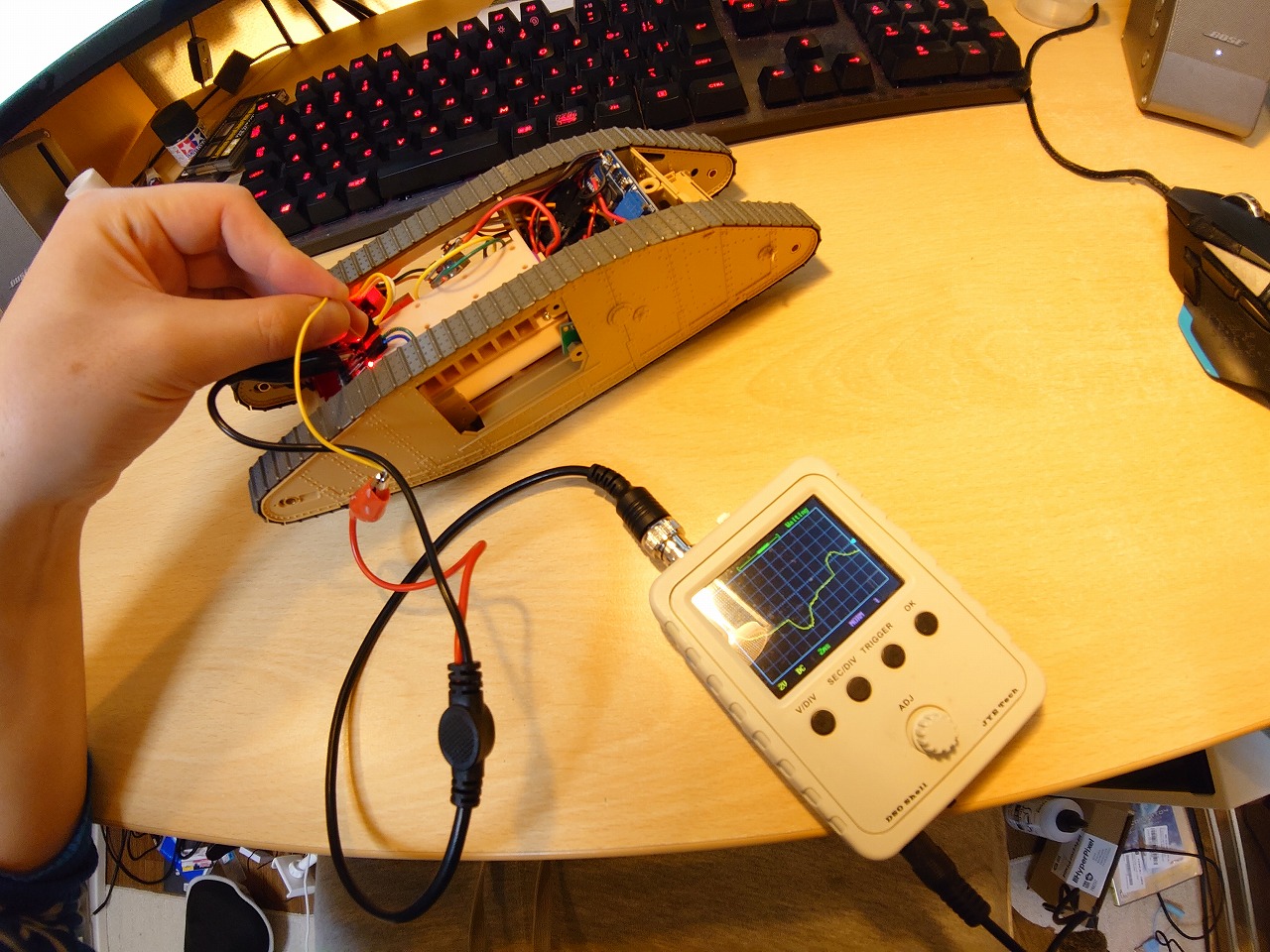
左履帯を動作させるPWM信号を見てみました。綺麗に波形が出ていますね。なので、PWMドライバには問題なさそうです。
次はモータドライバです。以前配線を間違えていたので、それが原因で壊れてしまっている可能性もあります。ただ、こちらもテスターで測ったら、問題なく出力している様子。原因は何だろう?あとはモーターくらいか…
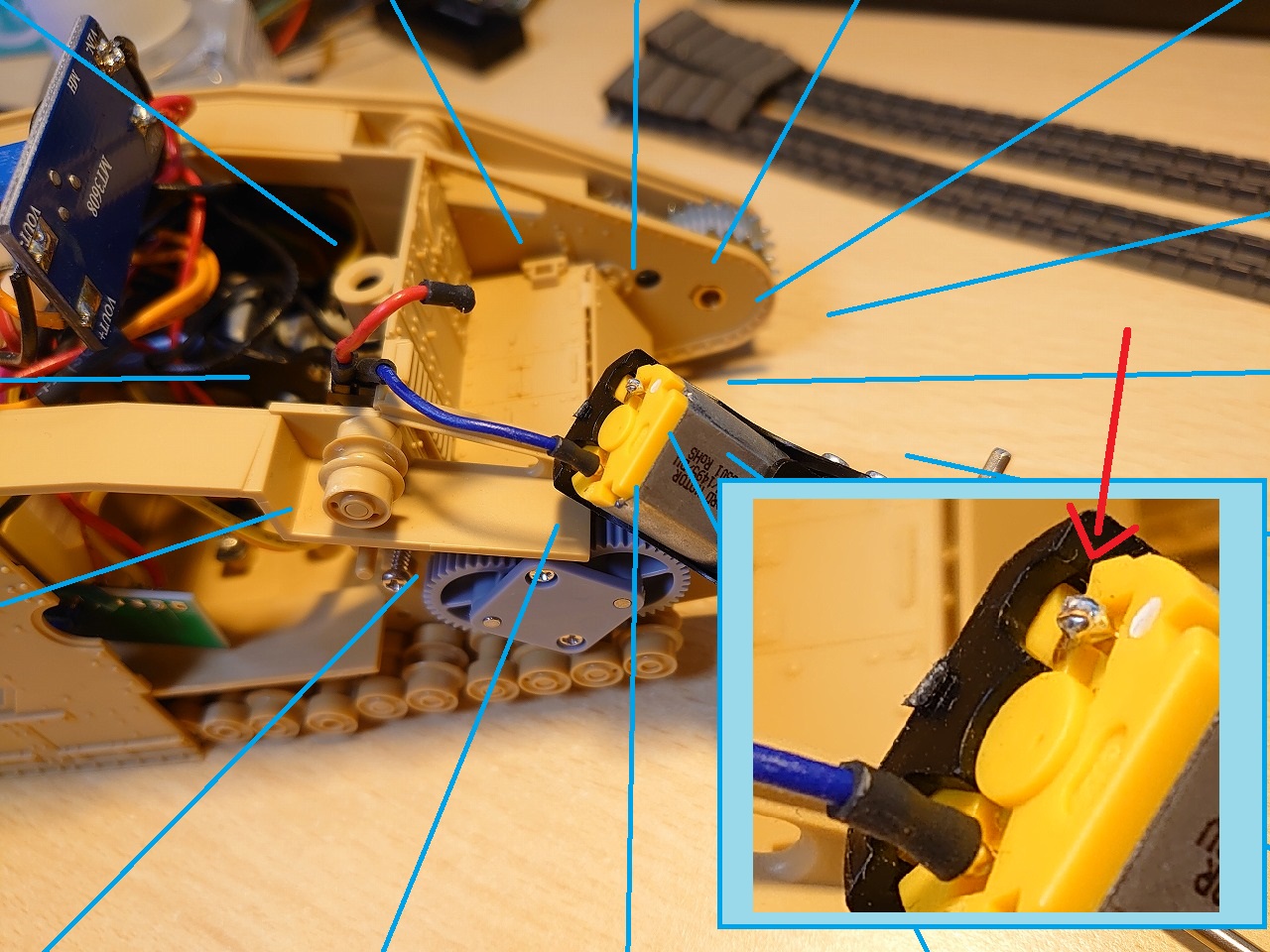
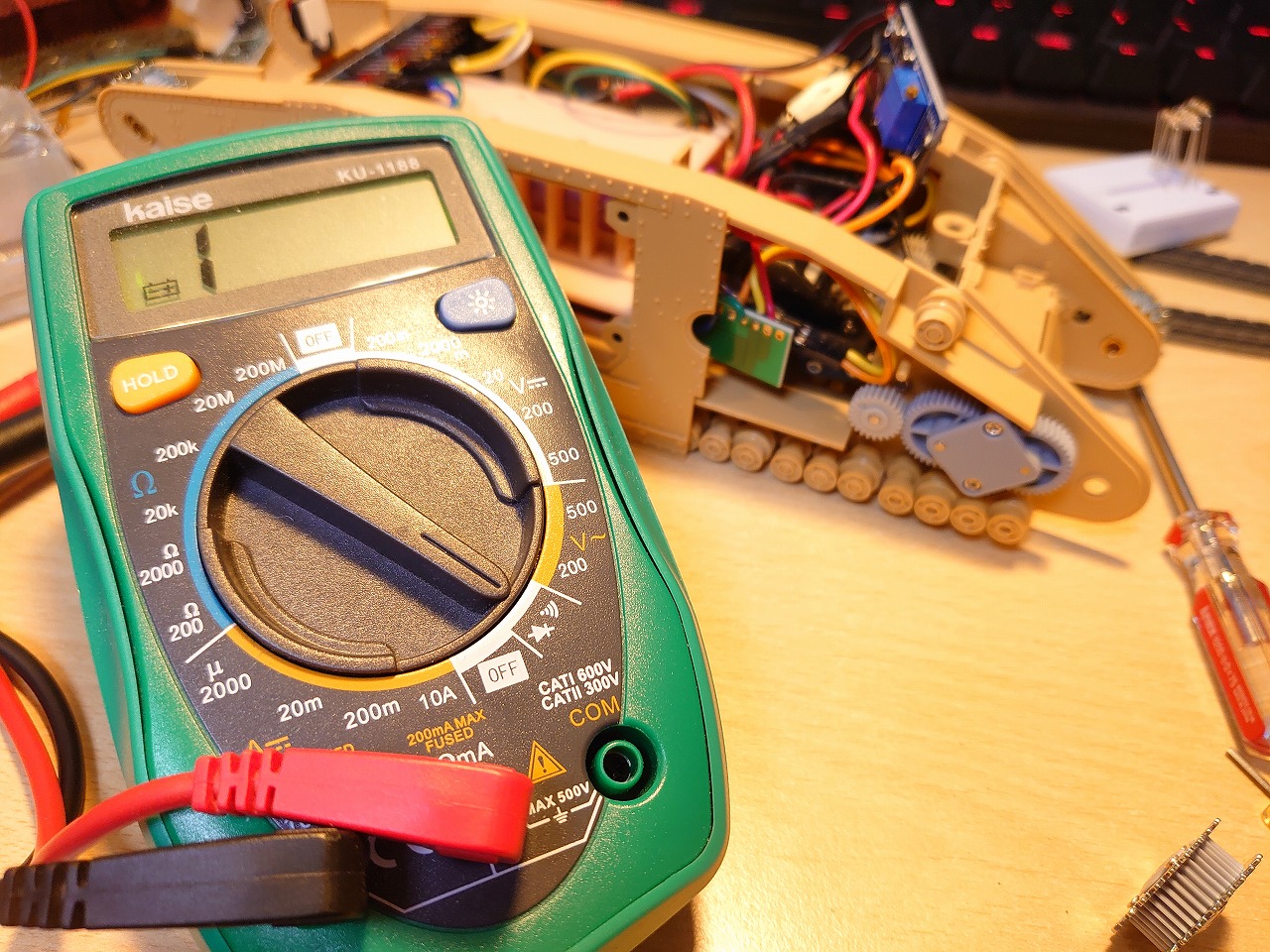
うっわ!ケーブル取れてるww最近、こんなのばっかりだw
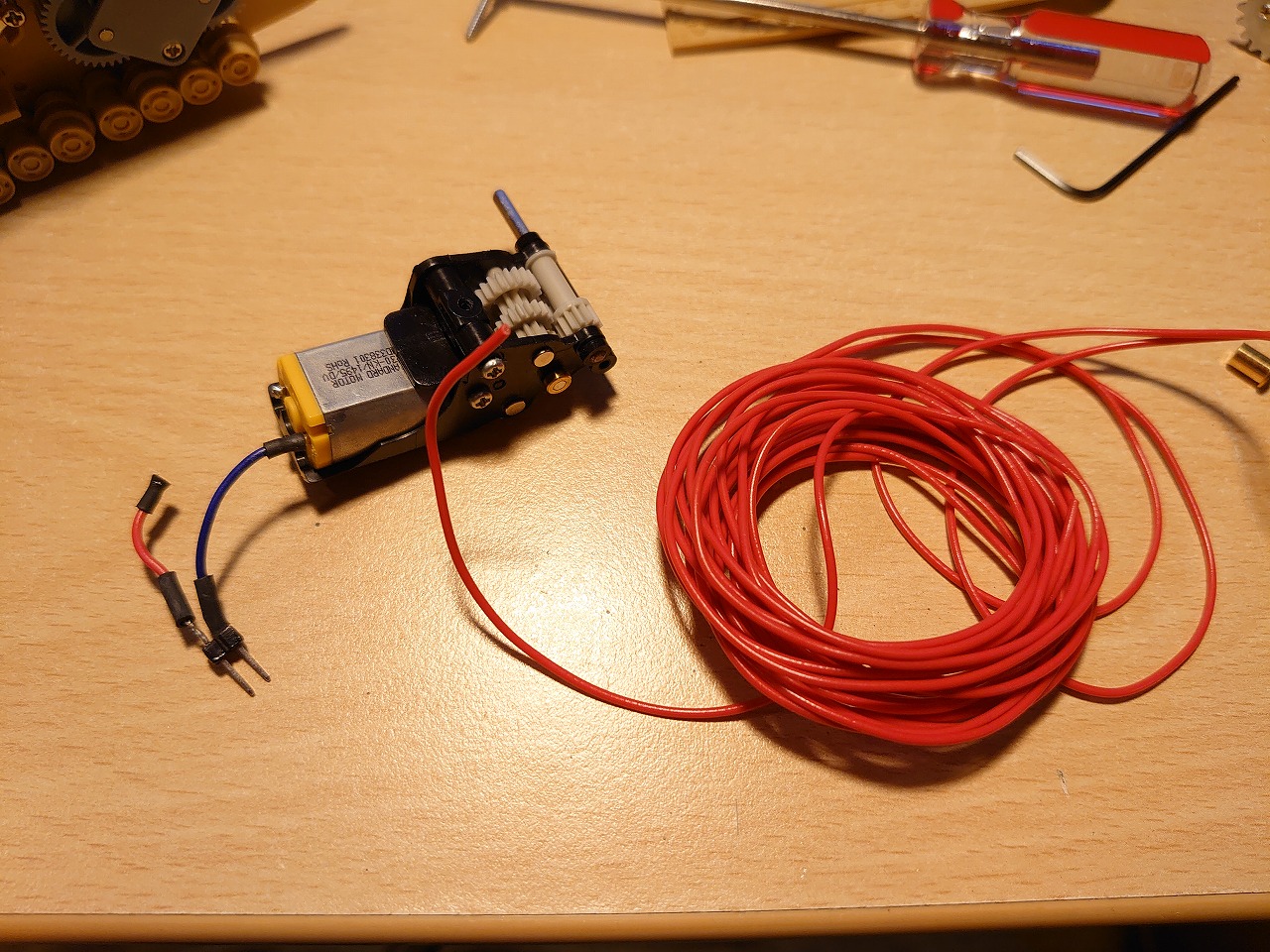
いやぁ、酷い有様ですね。ハンダ付けが甘かったのか、ケーブルとモーターの接続部分が外れていました。車内がギチギチなので、色々といじっている時に外れてしまったのかも知れません。
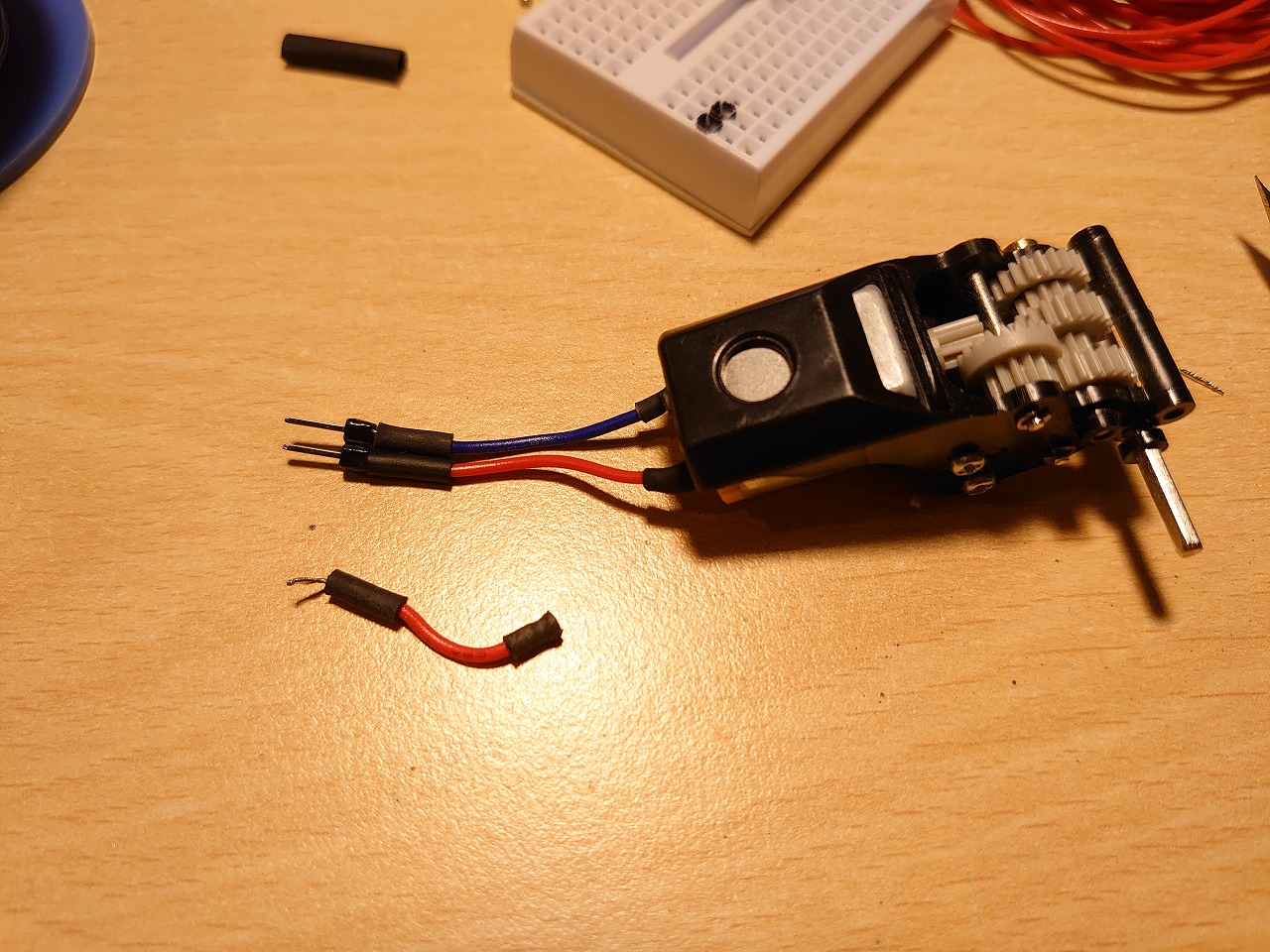
こんな感じでケーブルつなぎ直しました。しかし「家電が動かなくて色々調べてたらコンセント抜けてた」と同じレベルのミスをやらかしてしまいました。一瞬SAN値0になったのですが、今は大丈夫です。
問題なく動作できるようになった時の動画です。カメラも問題なさそうで良かった!
さりげなく作成していたカメラ付きmarkⅣ(タミヤの1/35スケール)が良い感じに動くようになりました
❗既存技術をくっ付けただけですが、地味に大変でした…(1年放置して現在2年目)
なんとか頑張って砲塔も動かしたいです
電球
あと塗装もやらねば!pic.twitter.com/DcMHOrqIQI— おりくらしげる (@shigeruorikura) April 23, 2020
左右の履帯を逆回転させる「超信地旋回」もすんなり行えます。マークⅣを超信地旋回させるのが嫌だったので動画ではやってません(謎のこだわり)。
今回は、砲塔旋回装置の作成もしていこうと思います!砲塔とサーボモータをどうやって接続するか、以前から検討していたのですが、中々良い案が浮かんでいませんでした。
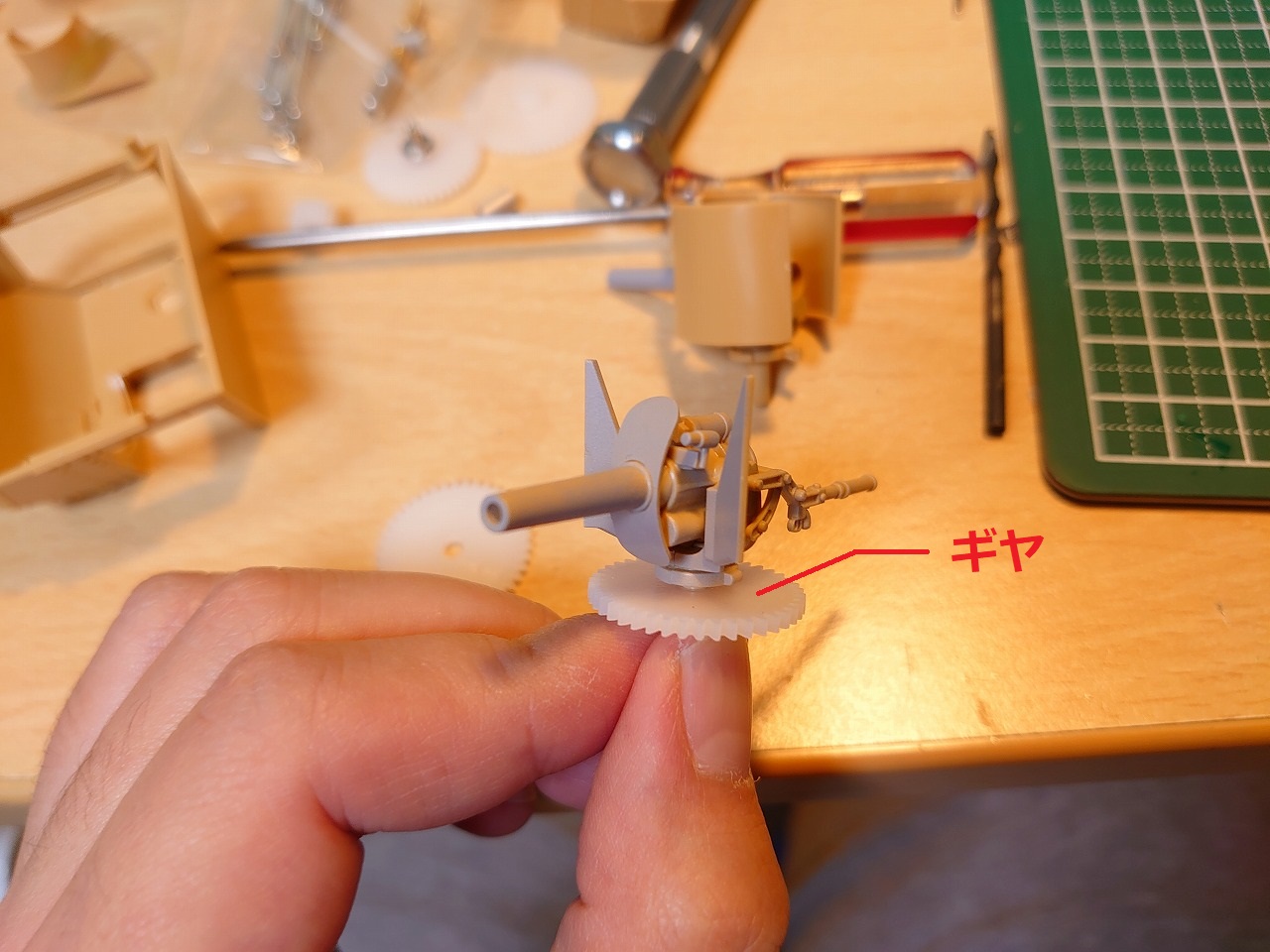
今回、Amazonで売っていた「プラスチック ギヤのセット」を使って砲塔とサーボモーターを接続する方式を使ってみる事にしました!(このギヤセットはそれぞれのギヤが1種類しかありません。MarkⅣは砲塔が左右対称にあり、同じギヤが2つずつ必要になるため、こちらの商品を2セット購入して試しています)。
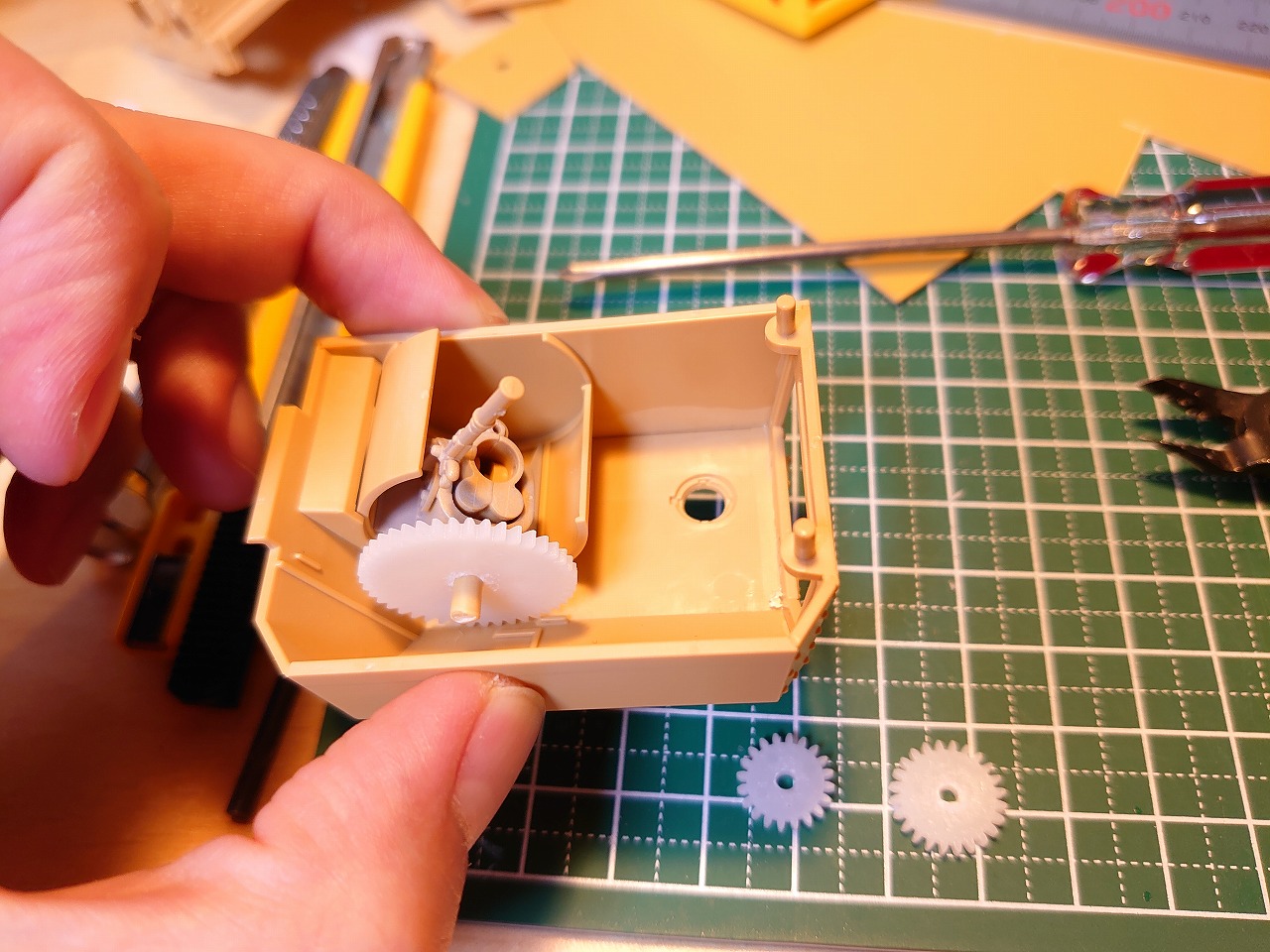
ギヤの穴を広げて、砲塔の軸パーツに取り付けられるようにしてみました。ただ、このままでは下部の軸を固定できないため、砲塔を旋回させる事が出来ません。
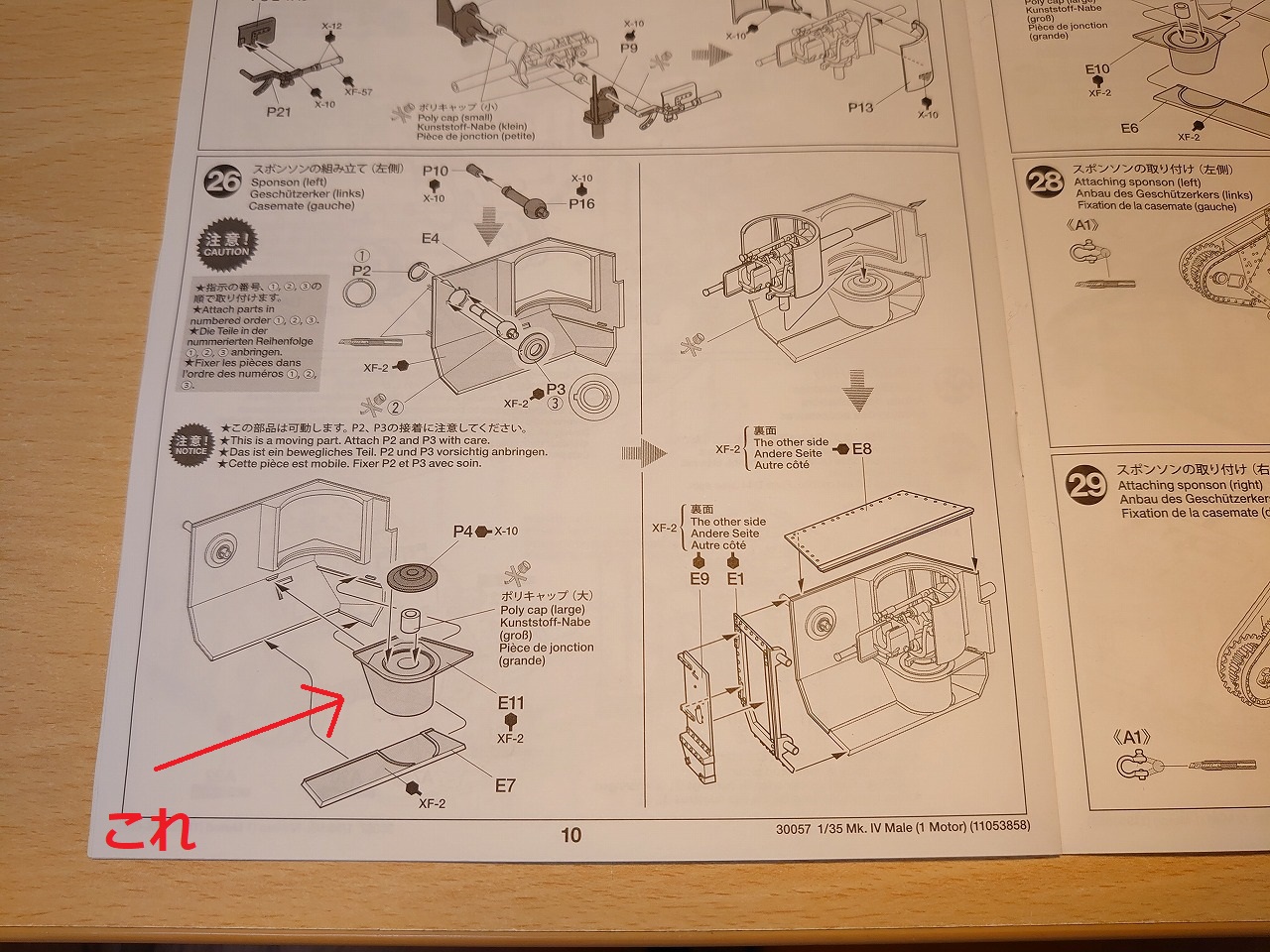
普通に作ると、このように砲塔を固定する部分(“E11″と書かれているパーツ群)があるのですが、ギヤを入れるスペースが確保できなくなるので、違う方法で砲を固定する必要があります。
どうしようかな?と色々検討していたのですが、Aランナーに余っているパーツがドンピシャで良さげな感じでした。
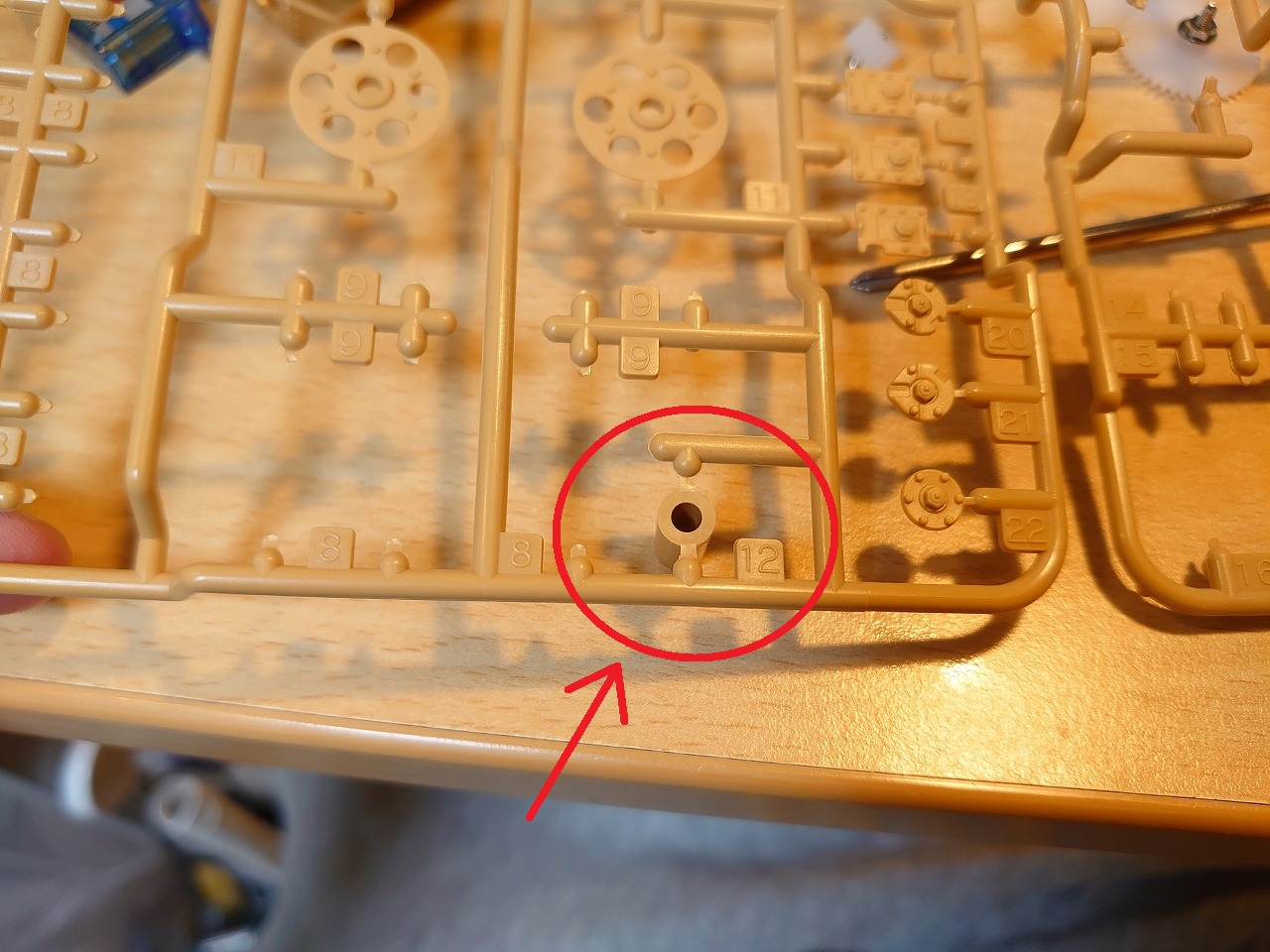
なんか、説明書を何度見返しても使う場面がない、こちらの「Aランナーの12番」。通称「なんかよくわからない余りパーツ」を砲塔の軸として利用したいと思います!
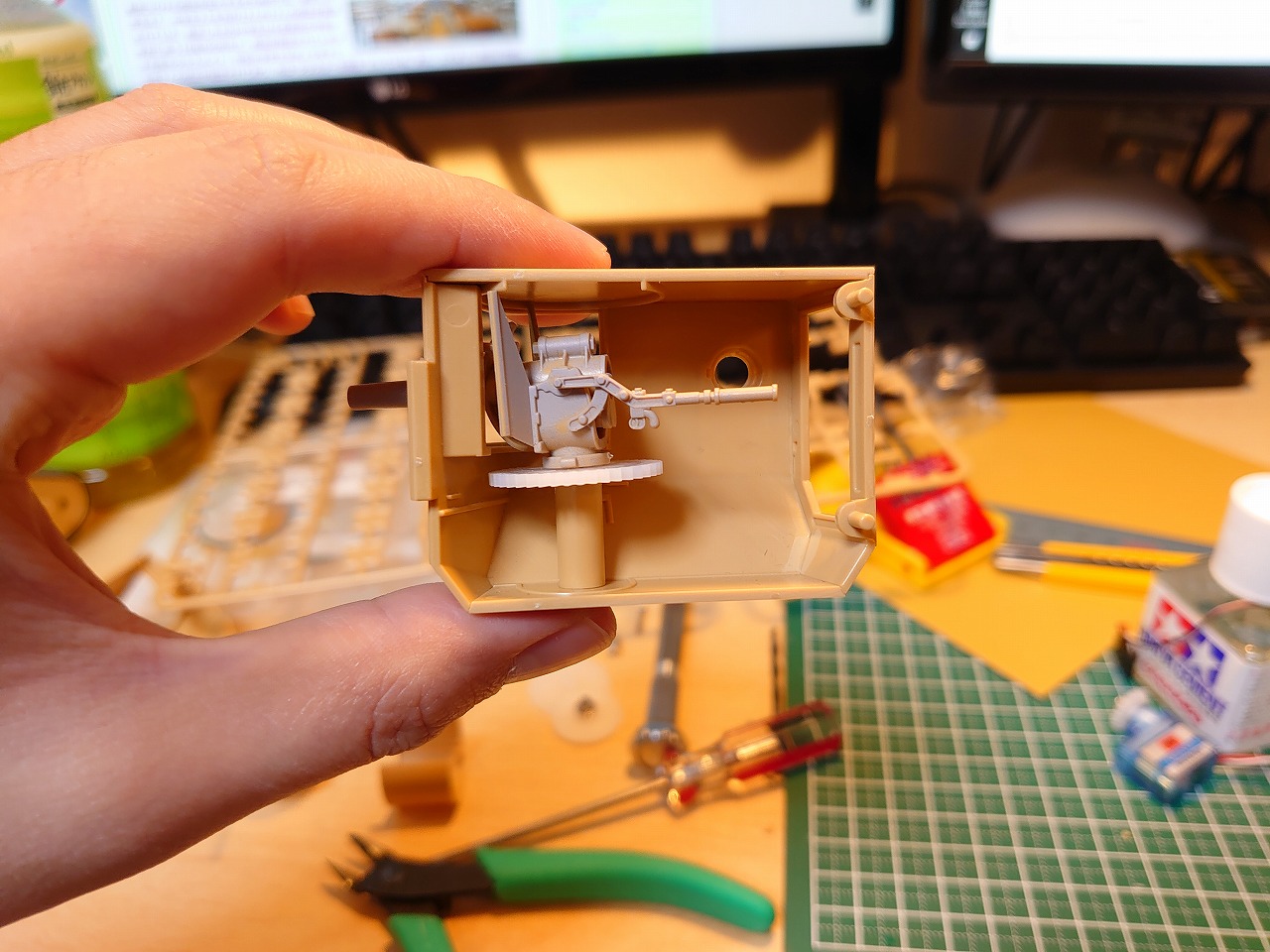
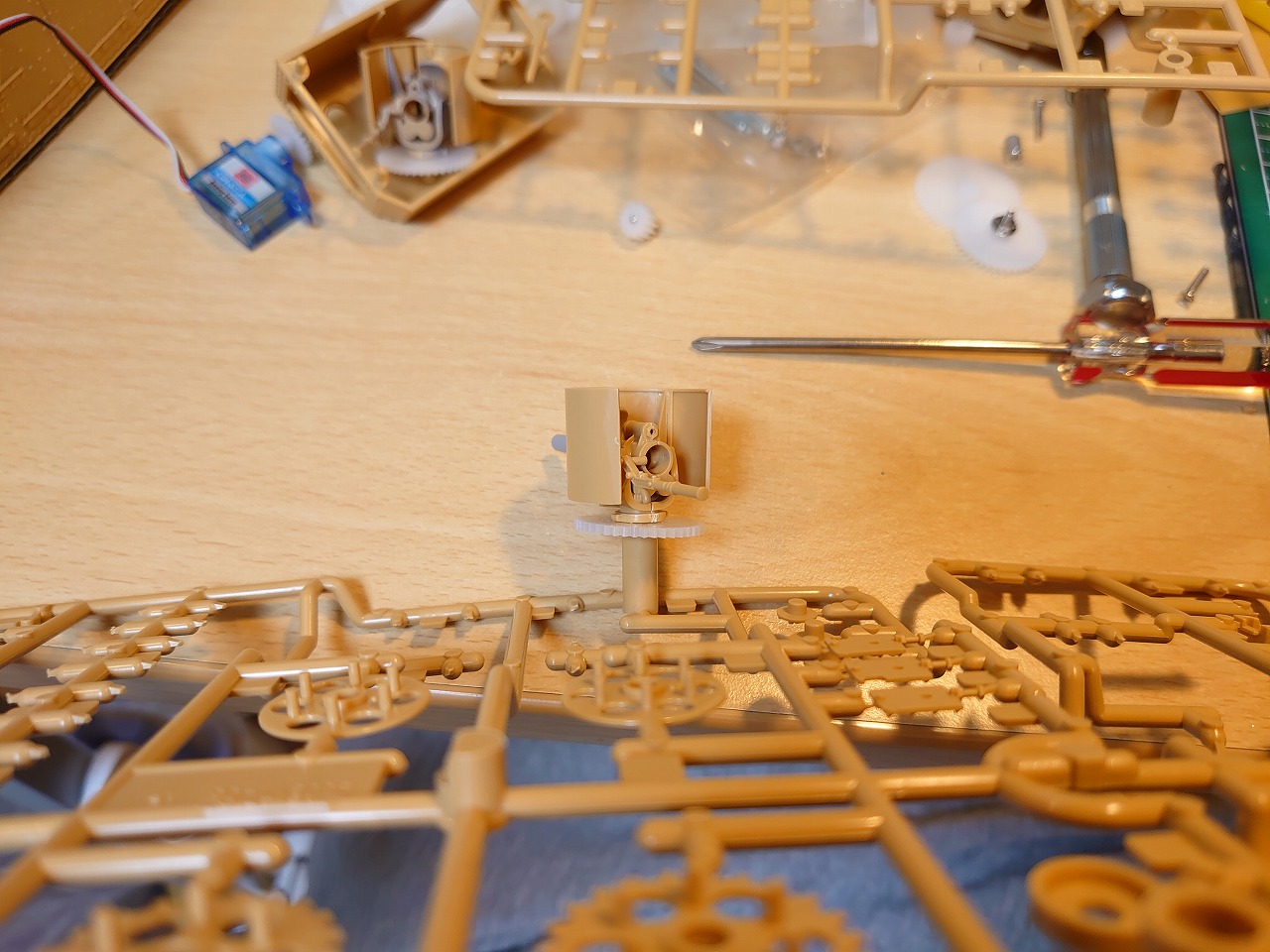
こちらは「なんかよくわからない余りパーツ」のパイプを軸の位置に入れてみた所です。このままではパイプが長すぎるので、切ろうと思います。また、パイプをそのまま接着すると、砲塔の取り外しが出来なくなってしまうので、六角スペーサーをかましてみる事にしました。
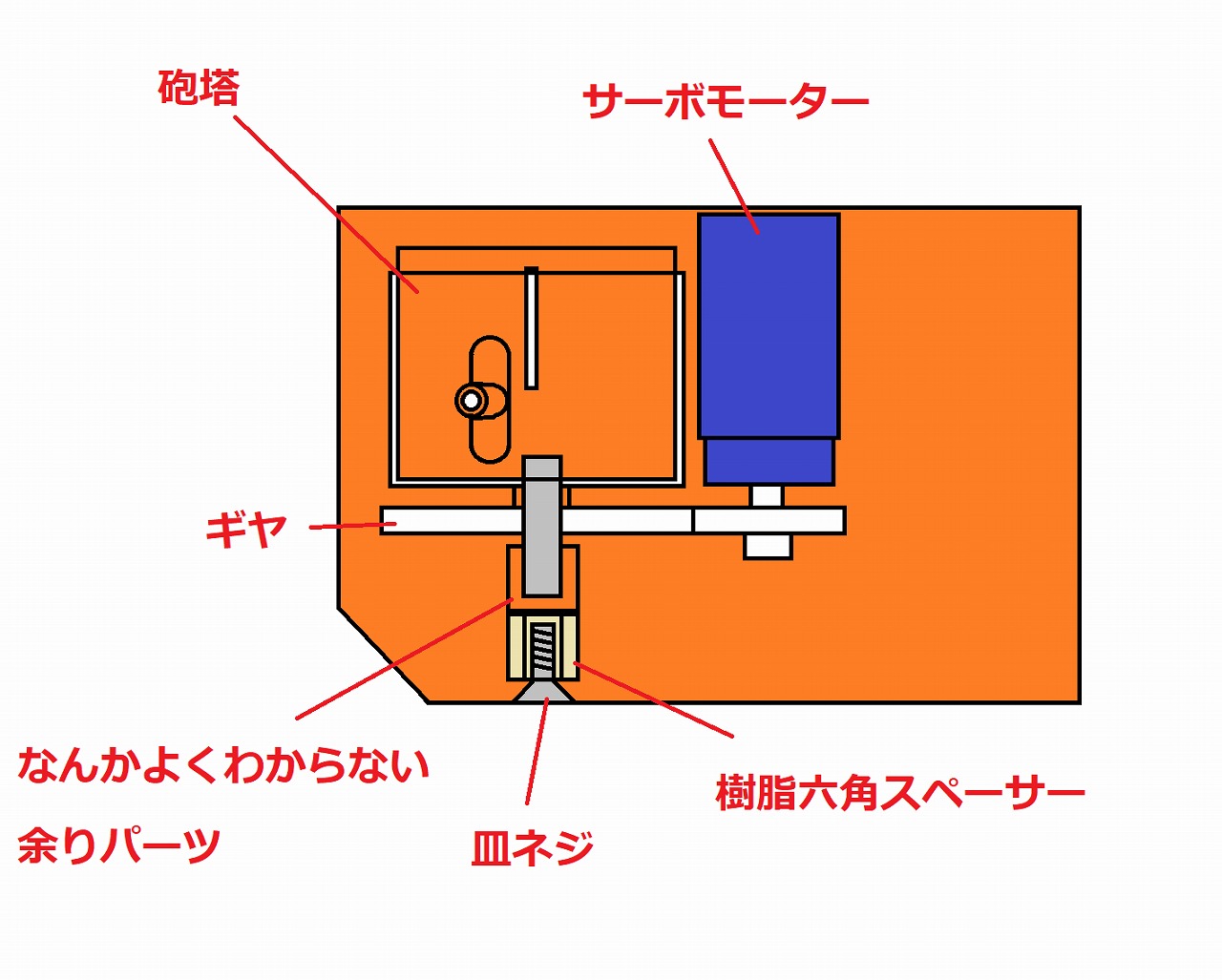
最終的にはこのような形にしようと思います!スポンソンの下部にネジを取り付けるため、外からネジが丸見えになってしまうのが残念仕様ですが、下の方なので目立たないかなと思います。
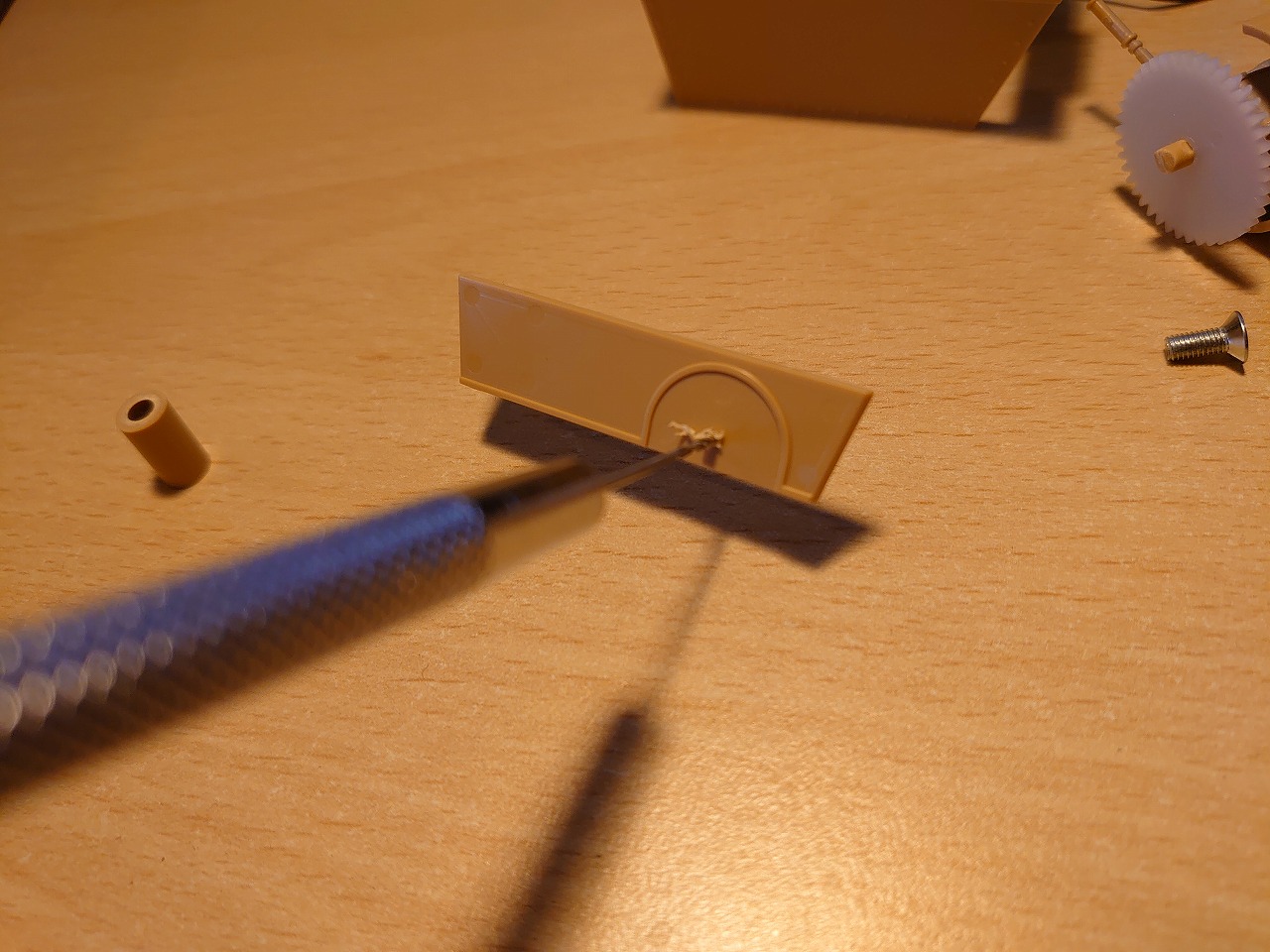
まず、スポンソンの床に穴をあけていきます。小さめのドリル(1.0mm)で最初の穴をあけて、そこから広げていきました。

「なんかよくわからない余りパーツ」を半分くらいに切って、瞬間接着剤で六角スペーサーとくっつけました。六角スペーサーは床下から皿ネジで固定しています。
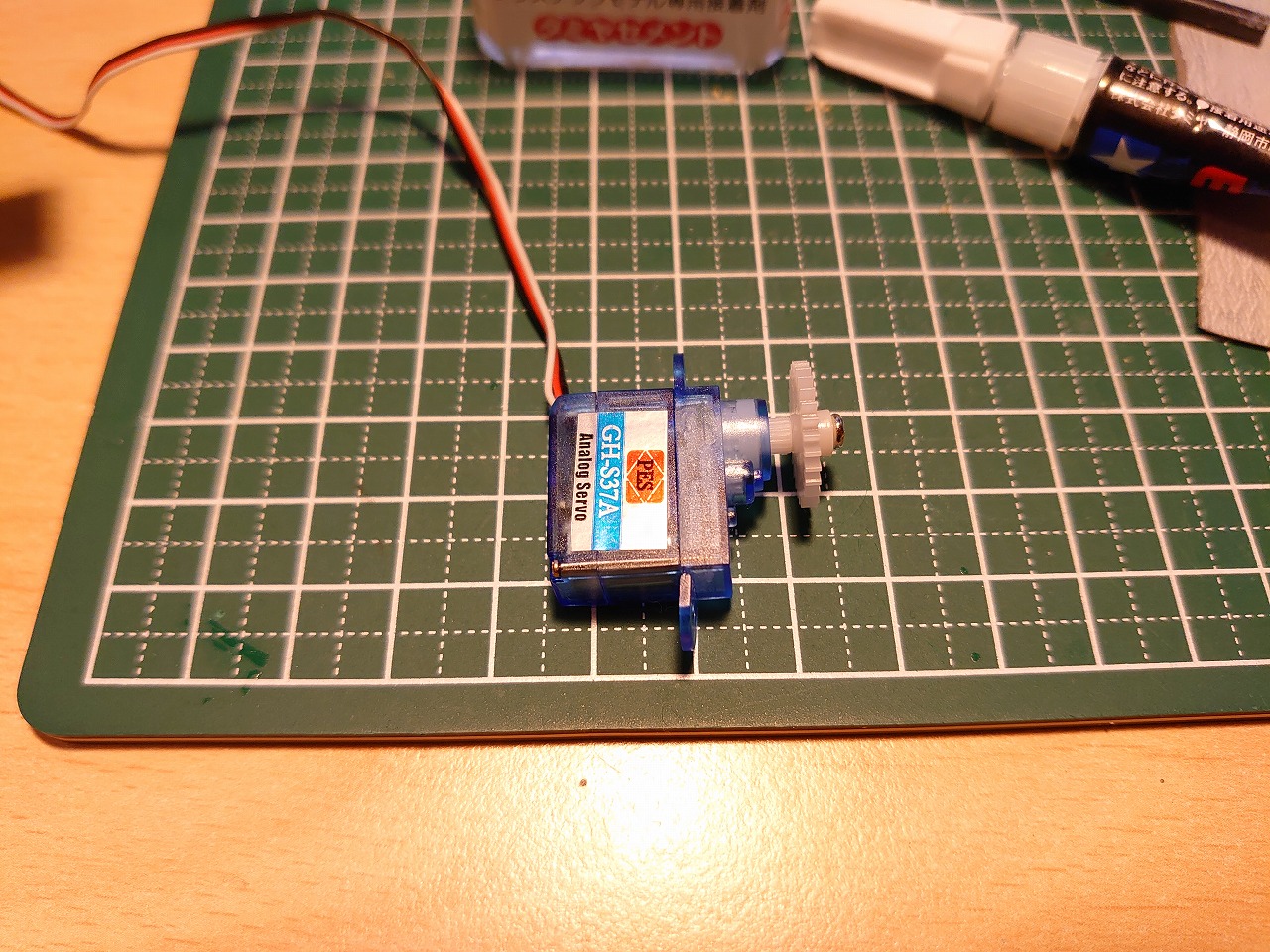
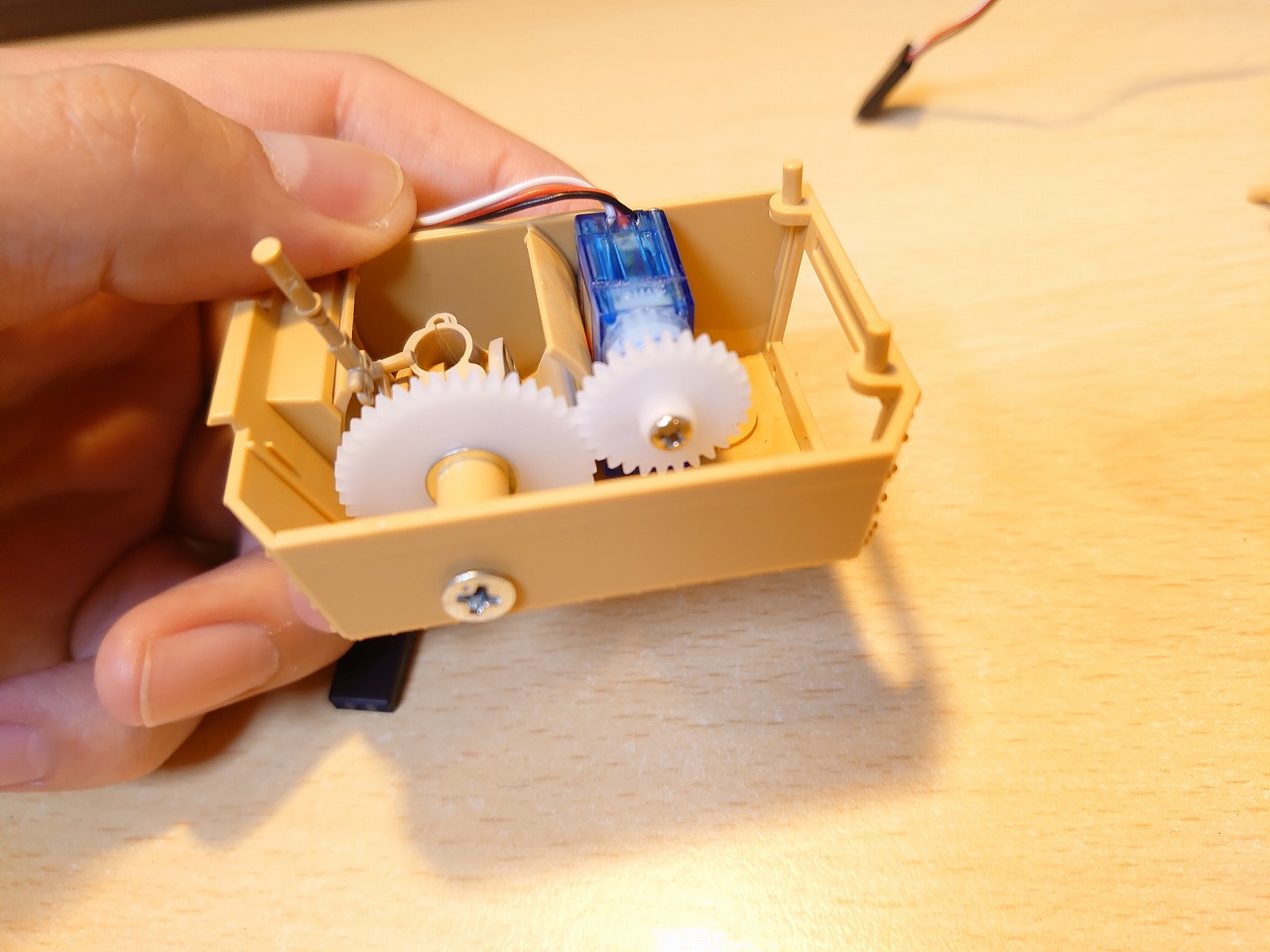
こちらは砲塔を旋回させるためのサーボモーターです。「volflashy アナログ サーボ 1pc 3.7G」という商品を使おうと思います!
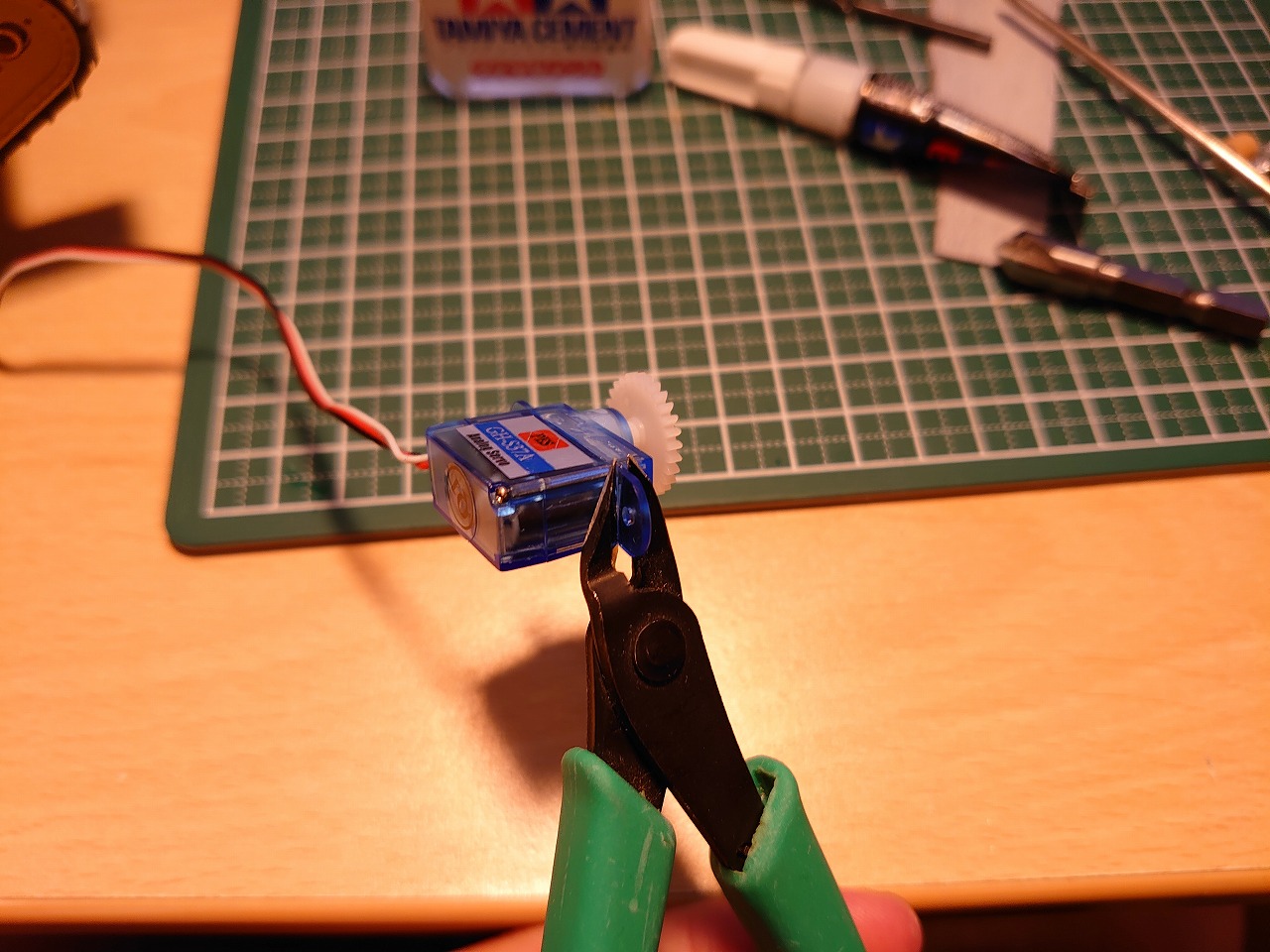
サーボモーターの取り付け用の部分は、車体に干渉してしまうため、ニッパーで切り落とします。
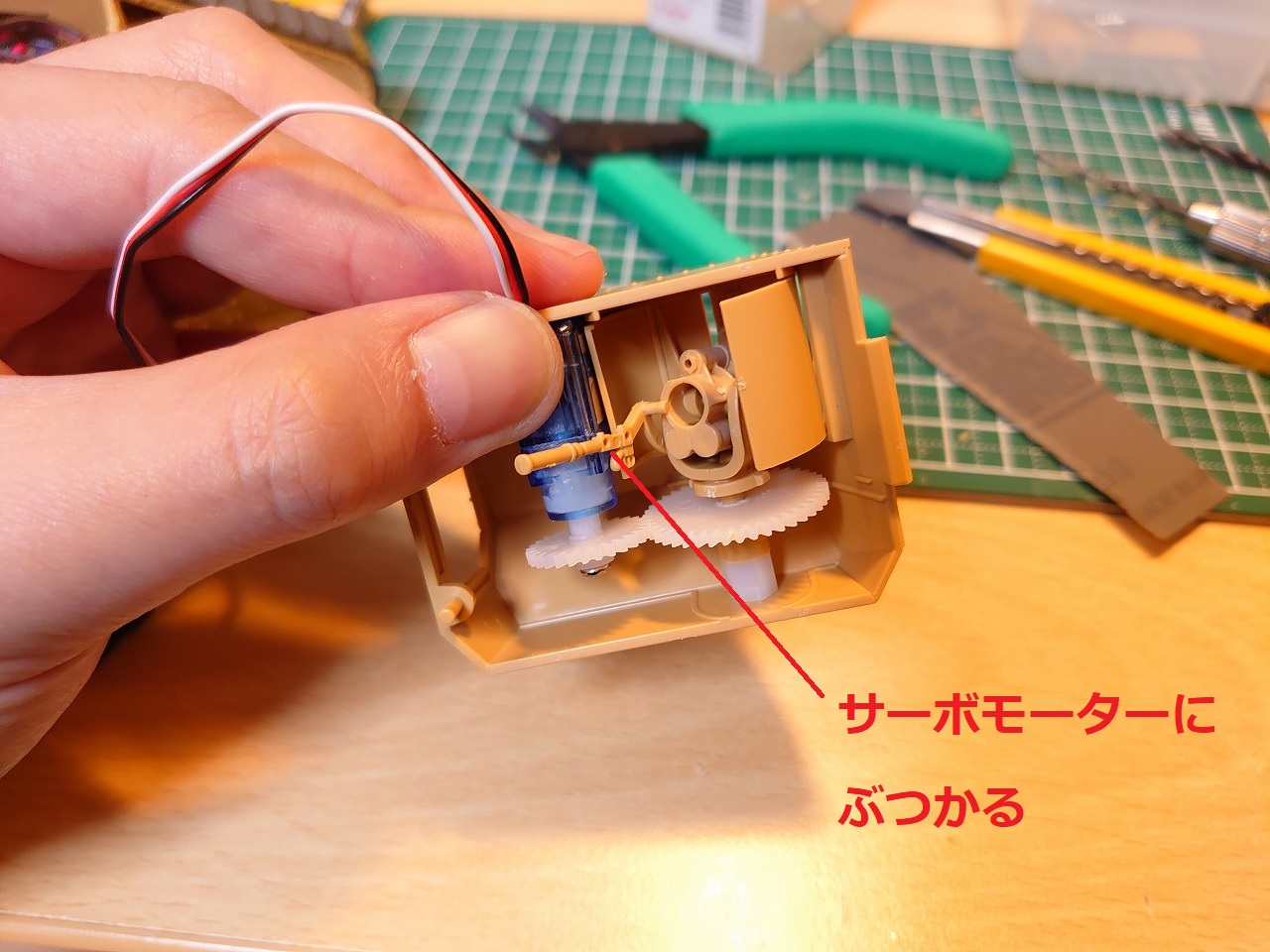
あと、左側の砲塔部分については、砲塔を車内から動かすためのバーがサーボモータと干渉してしまう問題が発生しました(右側の砲塔は干渉しない)。
仕方ないので切り落とす事にしました。砲塔を上下に動かす機構は何も考えていませんが、今後追加するかも知れません。その方法はその時考える事にします!(そしてその時後悔するまでがテンプレ)
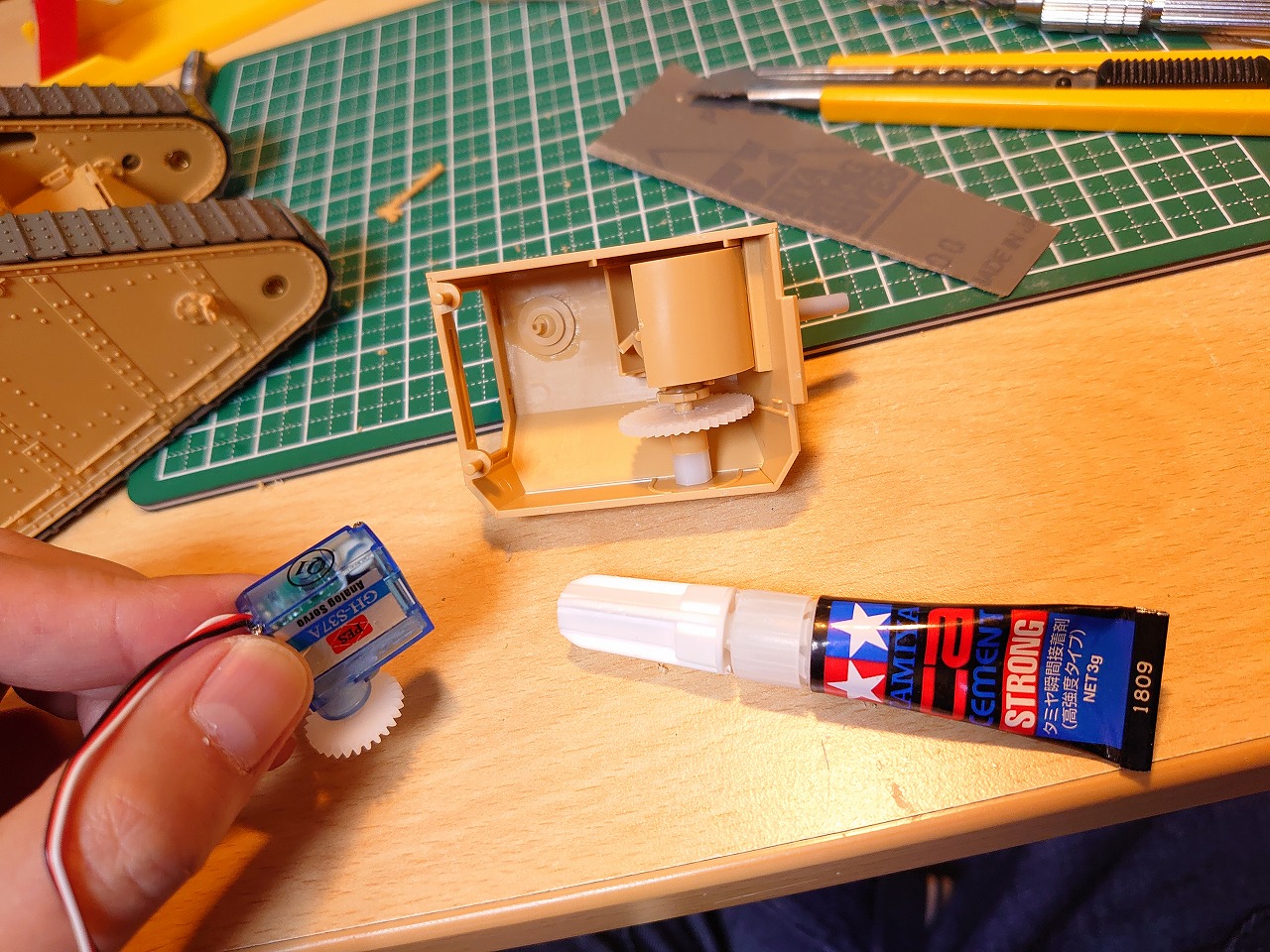
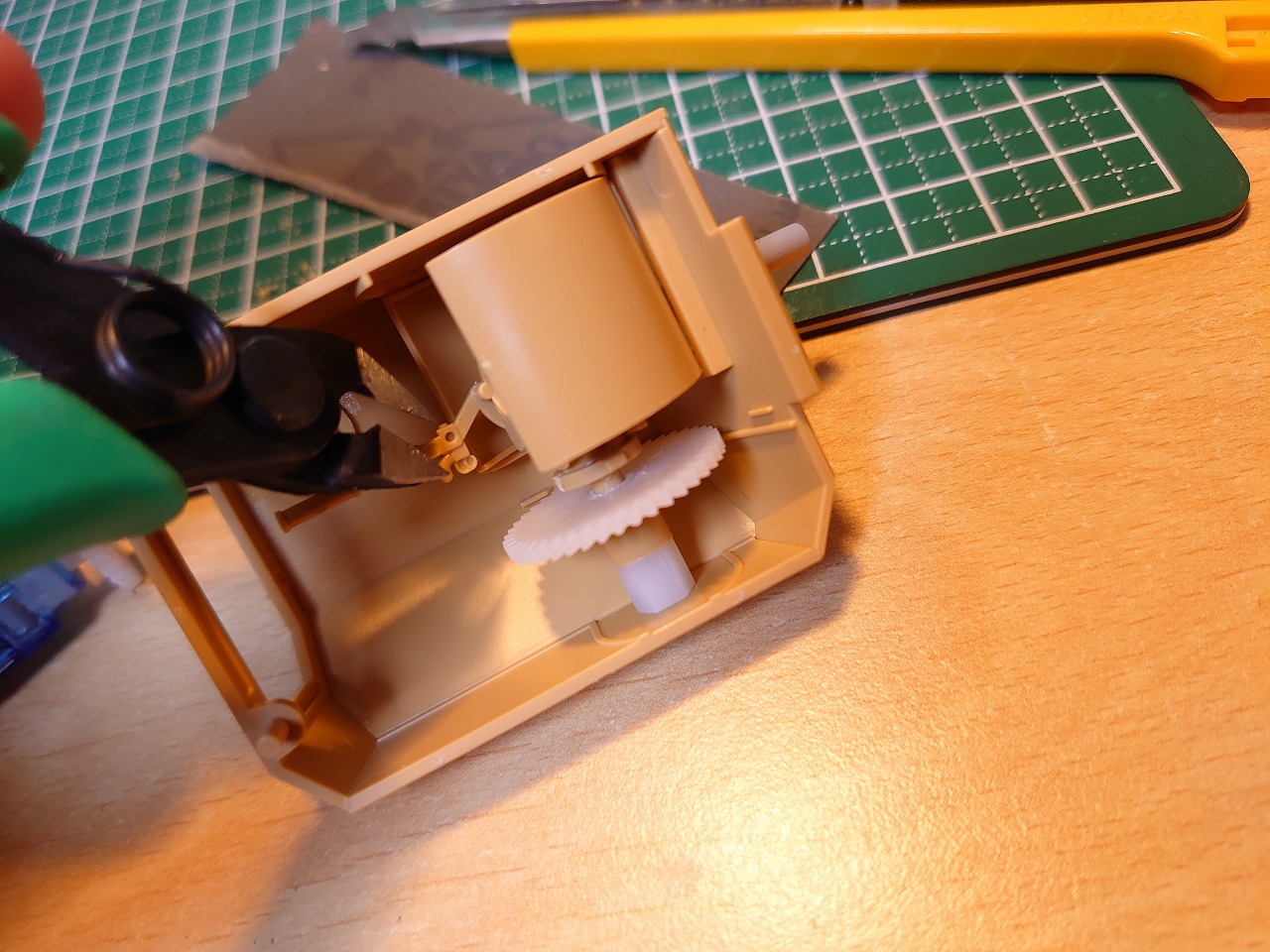
そのあとは、スポンソンの天井に瞬間接着剤で接着させるだけです。
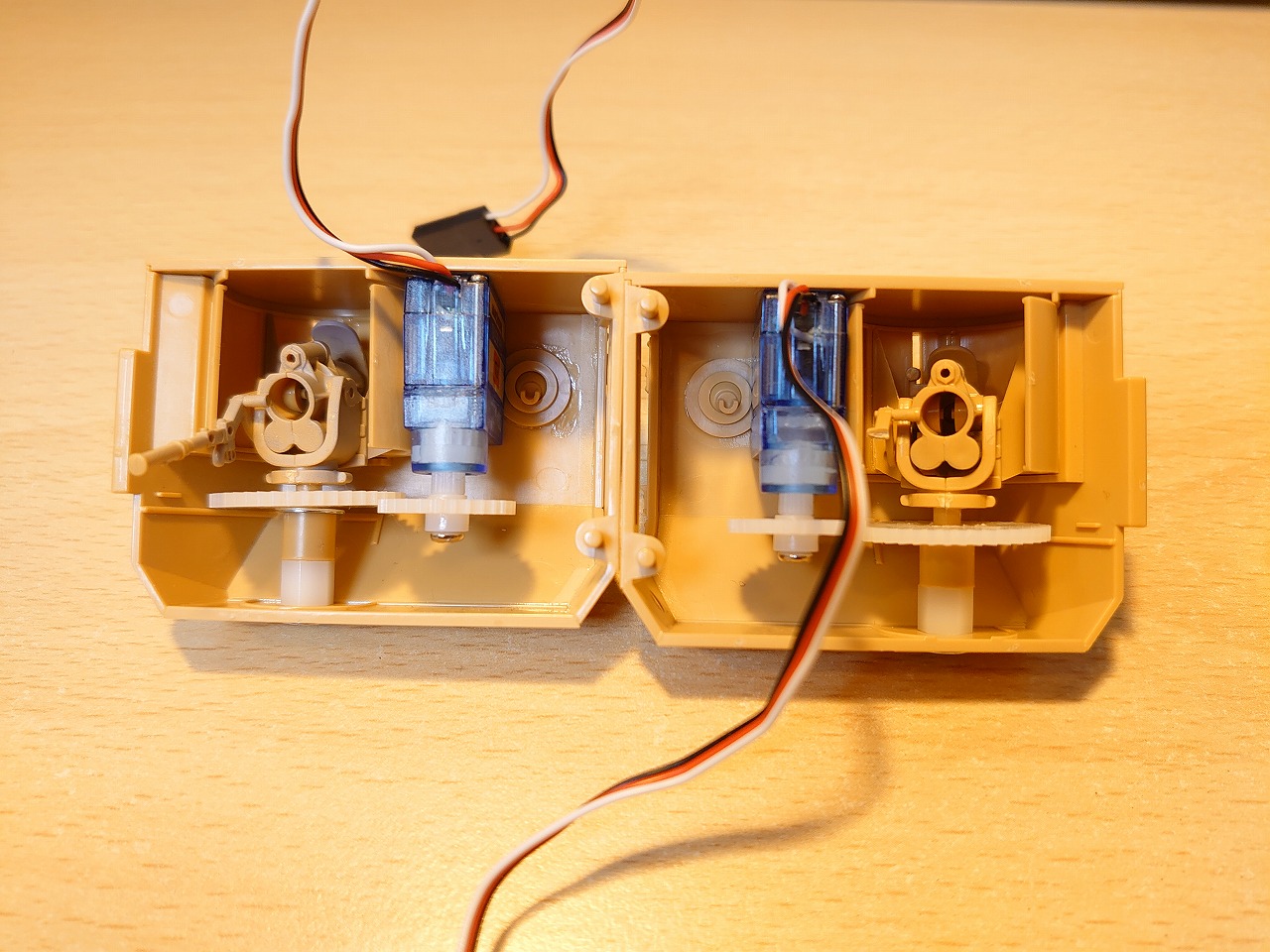
こんな感じで左右2個分完成です!ちょっと歪みが出てしまいましたが、とりあえず動かすだけなら問題なさそうなので、このまま進めていきます。
下から見た図です。ガッツリとネジが取り付いていますが、塗装したら目立たなくなるかと思います。

スポンソン後ろについているハッチをまだ取り付けていないので、外からサーボモータが見えます。
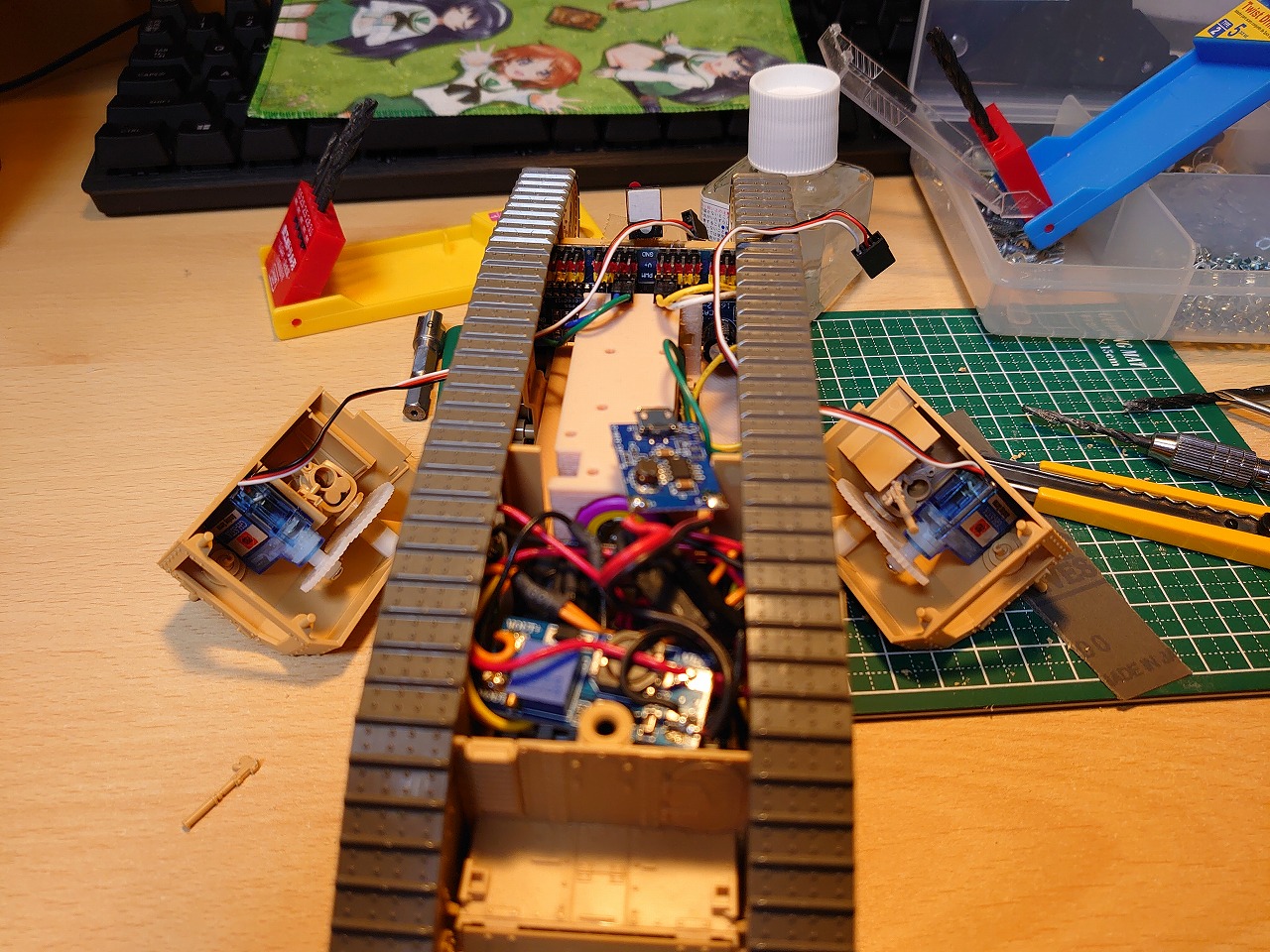
あとは車体に取り付けるだけです。サーボモーターのケーブルは内側から通して、PWMドライバに接続します。
ではプログラムを動かして動作テストしてみます。
第一次世界大戦の戦車とは思えない機敏な砲さばき
考えている顔pic.twitter.com/DcMHOrqIQI— おりくらしげる (@shigeruorikura) April 23, 2020
サーボモータの速度が速すぎますが、動きとしては問題なさそうです!良かった!ちなみに、この記事の時と同じサンプルコードを使っています。
あとは、スマートフォンから操作できるボタンを配置すればOKですね。そちらについては次の記事でやってみたいと思います!
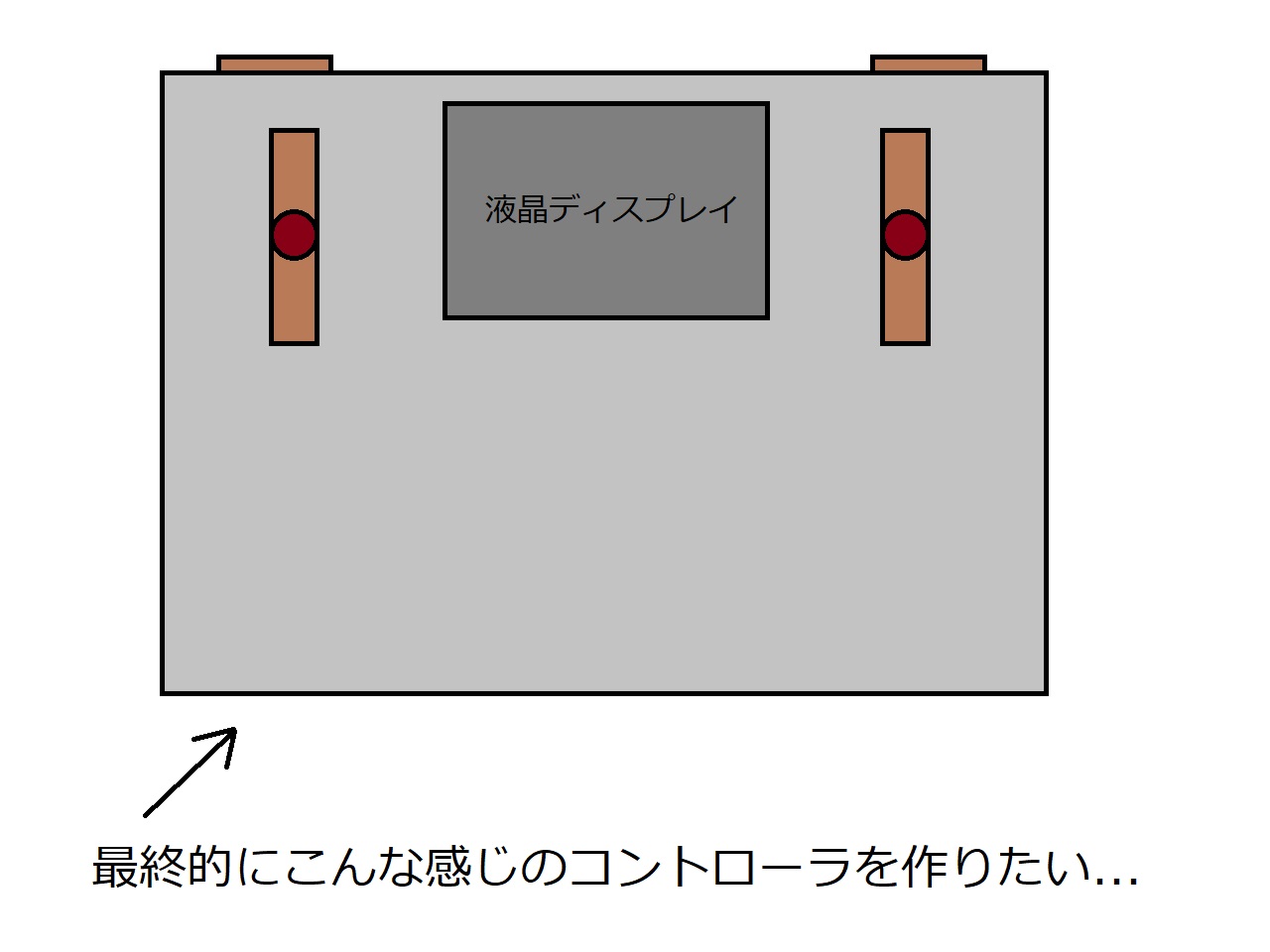
今は、スマートフォンで操作していますが、最終的には専用コントローラを作成して操作できるようにしてみたいと思っています。
正直スマートフォンで事足りるのですが、なんというか、こう、専用のコントローラってロマンです(笑)。
で、以前試しに以前の記事で書いたHyperPixelの高精細3.5インチタッチスクリーンディスプレイをRaspberry Pi 3Bで動作させてみました。これはraspbianのChromiumで表示させているだけです。
もし専用コントローラを作るなら、コントローラの制御はRaspberry Piにすると思います。現在Amazonでは、Arduino用のジョイスティック モジュール等も安く売っているので、そういった物で制御すのも楽しそうです。
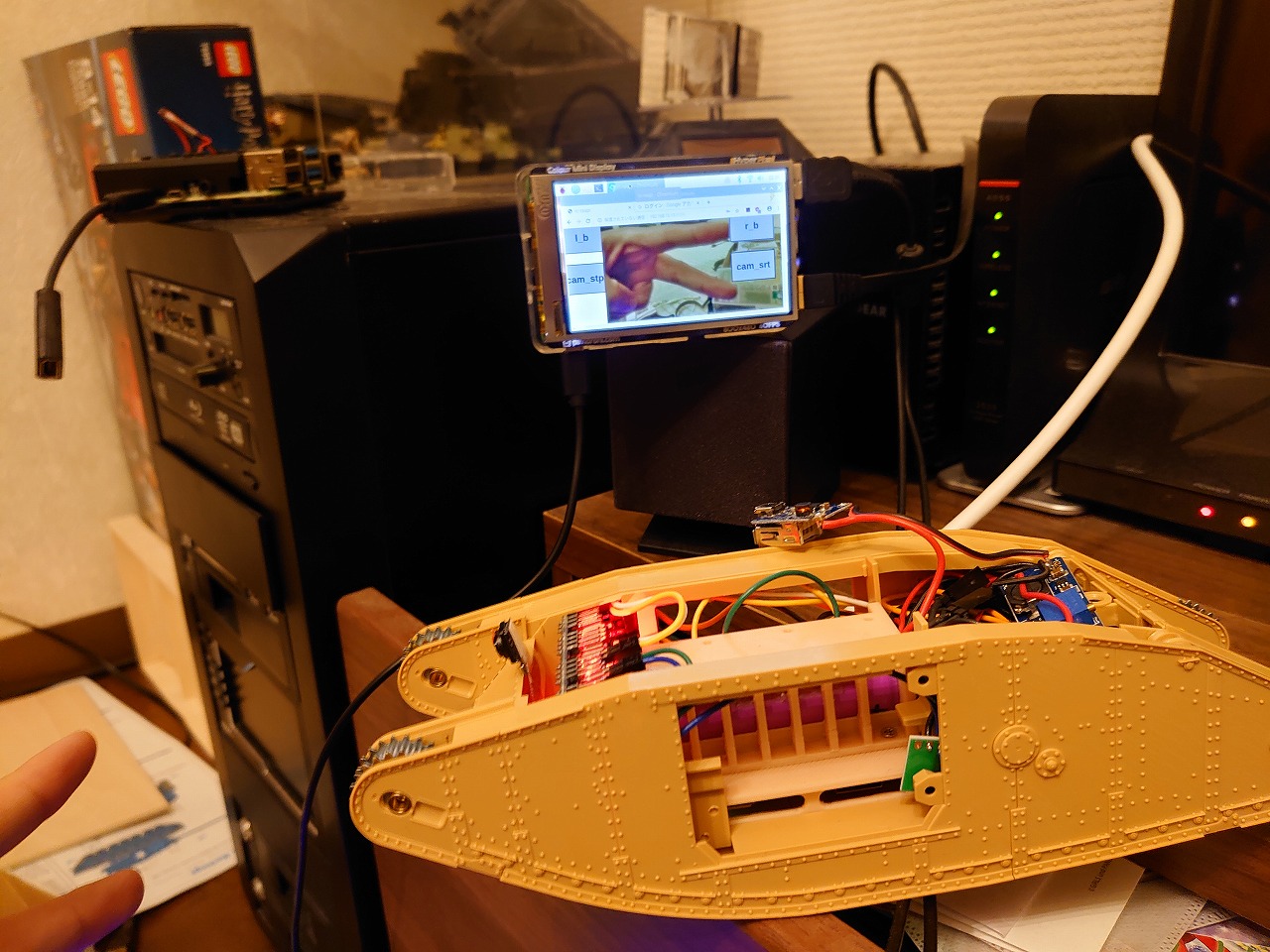
※全体図
今後、このモニターを使ってコントローラーを作成するかも知れませんが、とりあえずは本体完成+スマートフォンで操作を目標にして進めて行こうと思います!
という訳で、今回もマークⅣの記事を更新しました!
前回はソフトウェア周りに重点を置いていましたが、今回はハードウェア周りがメインの記事でした!
今回の記事で思い出しましたが、現在MarkⅣの速度調整が出来ていません。PWMドライバが入っているので、ソフトウェアから速度調整はできるのですが、webブラウザに表示しているのはボタンなので、別の操作方法で試さないと駄目ですね。今後はその辺もやってみようと思います!
今回はこれで終わりです!また、どこかのタイミングで記事を更新しようと思います!ではでは~
・続き↓
・前回↓
タミヤ 1/35 マークIV カメラ付きラジコン化計画 (その19) ~WebIOPiの導入~
・一覧↓
カメラ付きラジコン化計画シリーズ
more
2021/07/11
 ~砲塔の制御~")
2021/05/04
more
 豊平")
2026/05/11

2026/04/25

2026/04/18
more
more

2026/05/12
![[Chitubox]サポート材の自動設定で3Dプリンタの高さ制限超えた時の対処法](https://shigeru-orikura.com/wp-content/uploads/2026/05/chitubox_005sd-blogsize-150x150.jpg "[Chitubox]サポート材の自動設定で3Dプリンタの高さ制限超えた時の対処法")
2026/05/03

2026/04/26
 ~サーボモータの追加~")
~主砲部分や前照灯の作成~")
~ドライブホイールの作成~")
~車高調整と車体作成~")
 シティ オフロード消防車 60393 を作ってみた")
 スピードチャンピオン ケーニグセグ ジェスコ 76900 を作ってみた(その2)")
 スピードチャンピオン ケーニグセグ ジェスコ 76900 を作ってみた(その1)")



