")

~駐退機の作成~")


 ~ダブルモーター化~")
 ~車体の下地塗装~")
2021/07/11

~おりくらしげるのブログ~
前回はI2C通信を行い、PWM制御でサーボモータを動かしました。今回はマークⅣの足回りを作成していこうと思います!
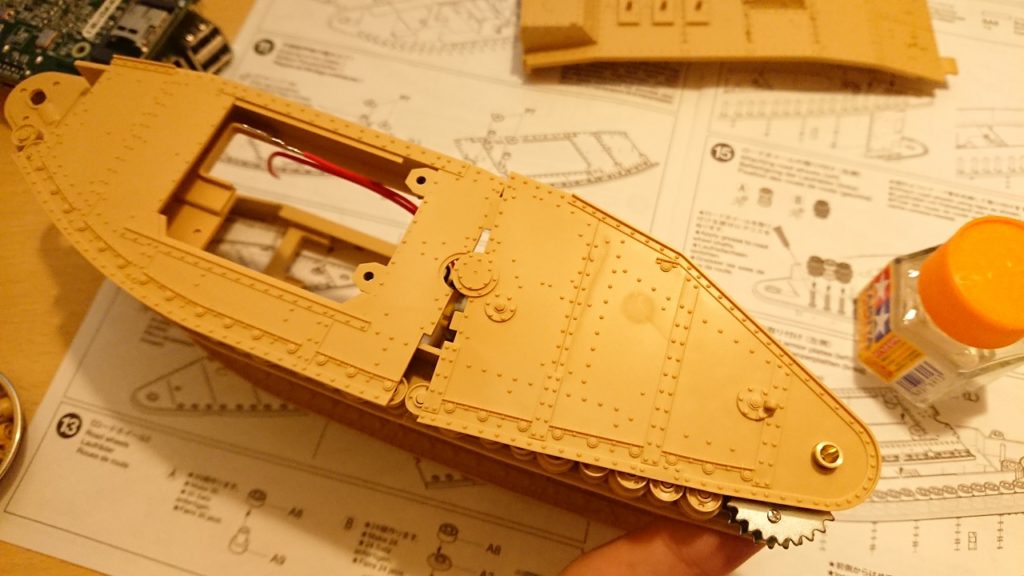
まず車体側面の装甲を作成していきます。
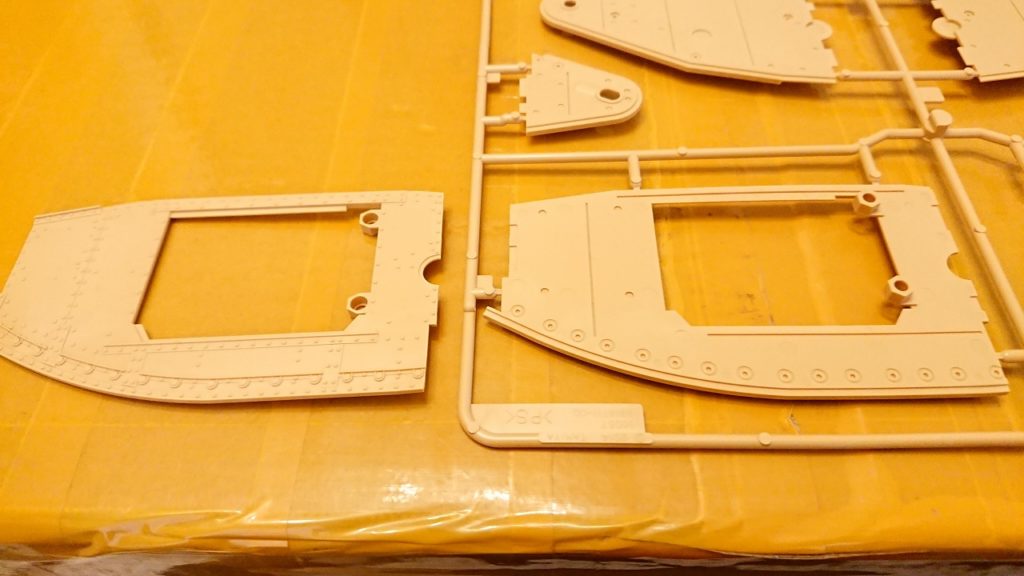
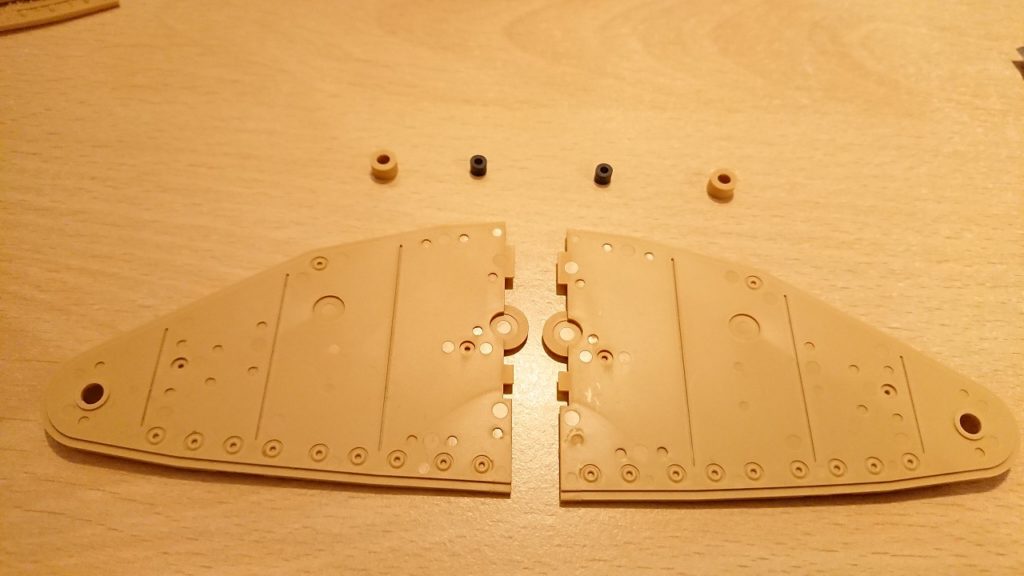
こちらが車体側面装甲です。中央にある四角い穴は、主砲を搭載したスポンソンを取り付けるための空間です。

スポンソンは取り外しをできるようにするため、ポリキャップで2か所取り付けます。
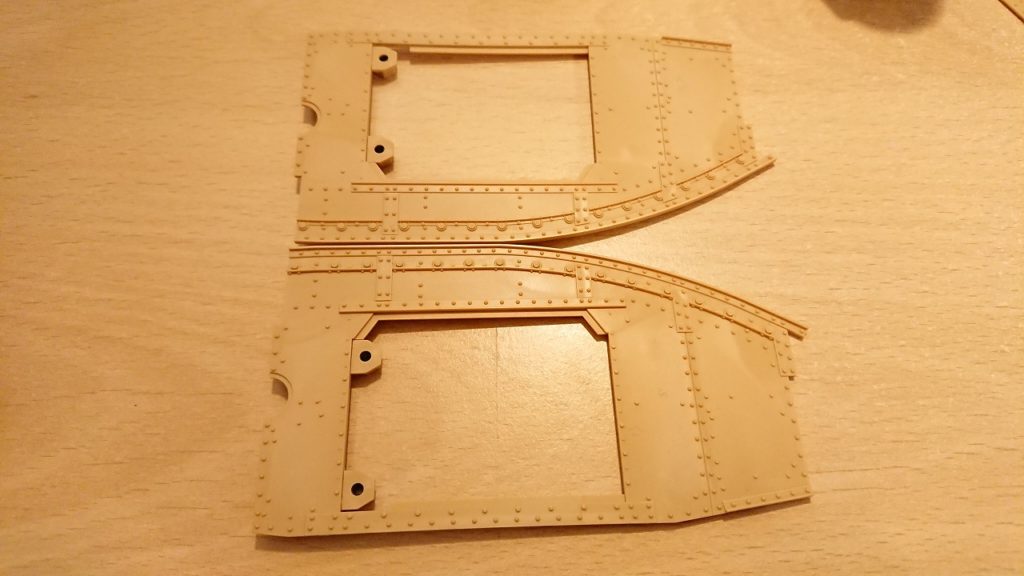
こんな感じで2セット完成!
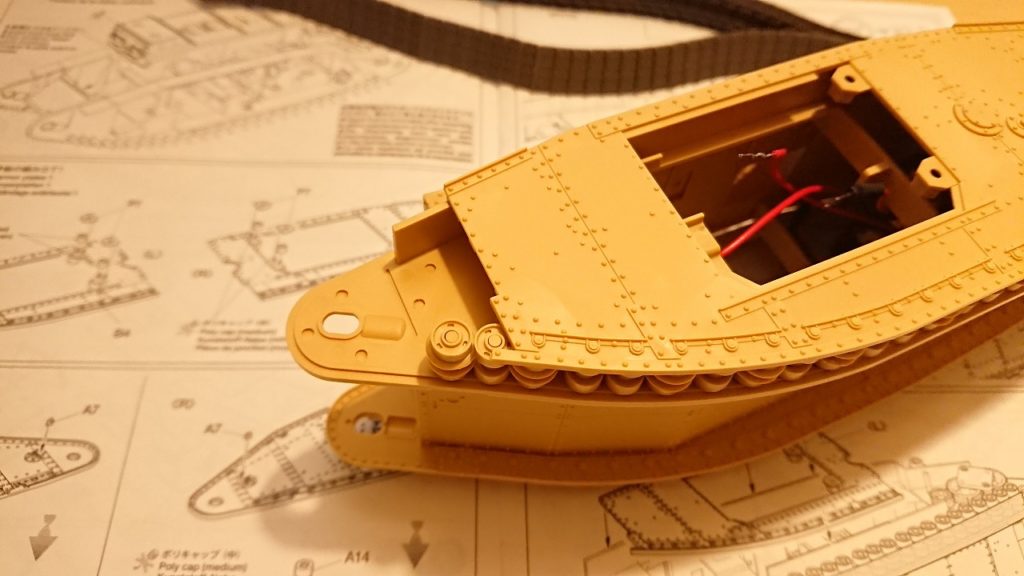
先ほどの側面装甲は車体中央部分の物でしたが、こちらは車体前方の側面装甲です。装甲の端にアイドラーホイールを取り付けるための穴が開いています。
こちらも先ほどと同じように車体側面に固定するためのポリキャップを取り付けます。こっちは1つづつみたいですね。
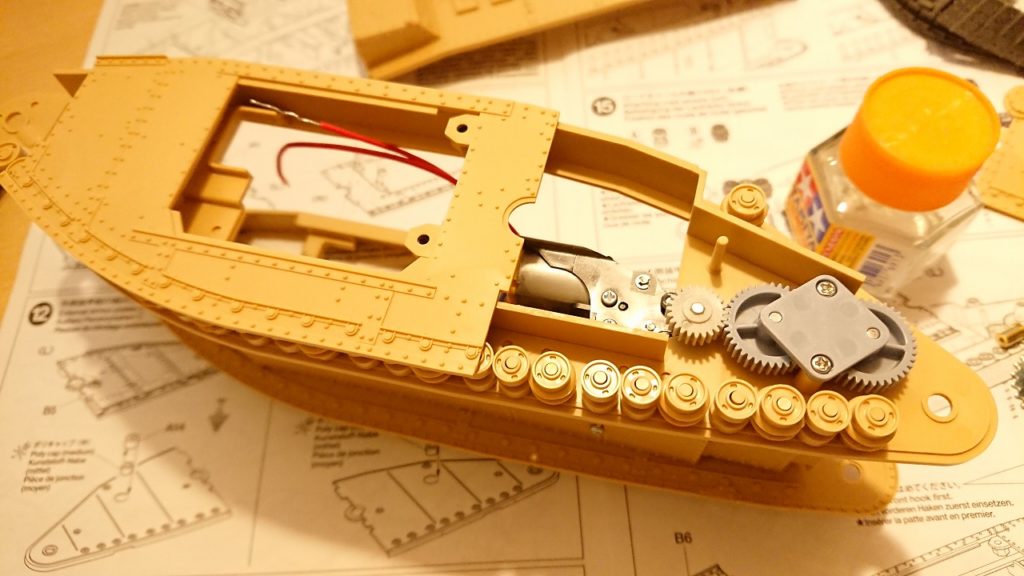
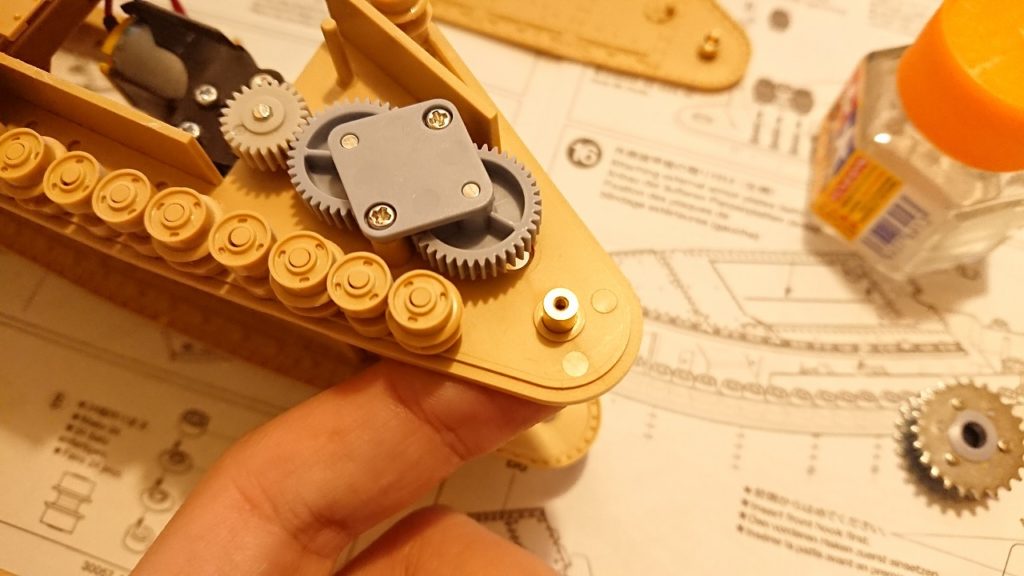
走行するためのDCモーターとギヤは以前取り付けましたが、このままではドライブホイールを回転させることができません。そのため車体中央から車体後部のドライブホイールに動力を伝えるためのギヤを車体側面後部に取り付けていきます。
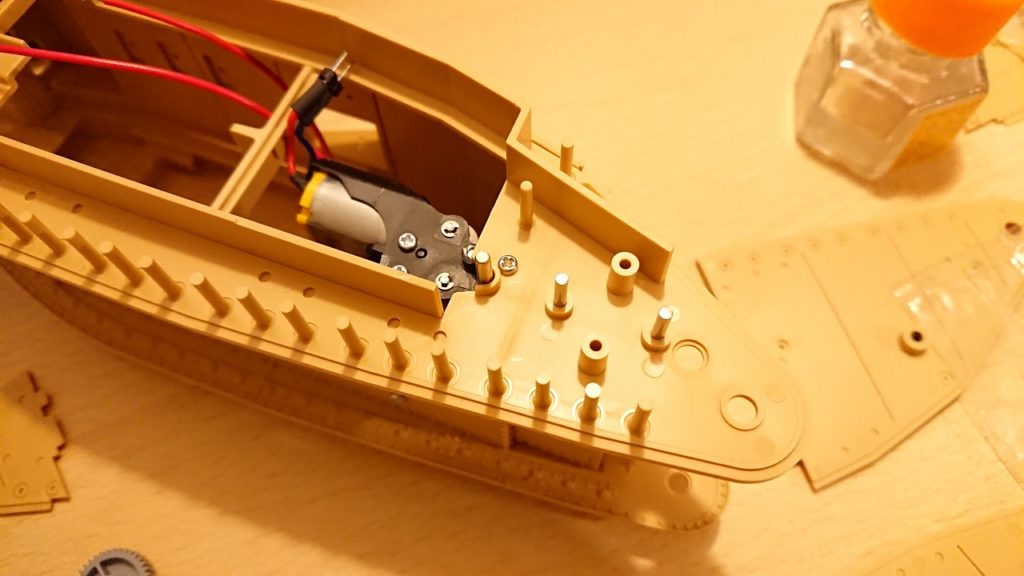
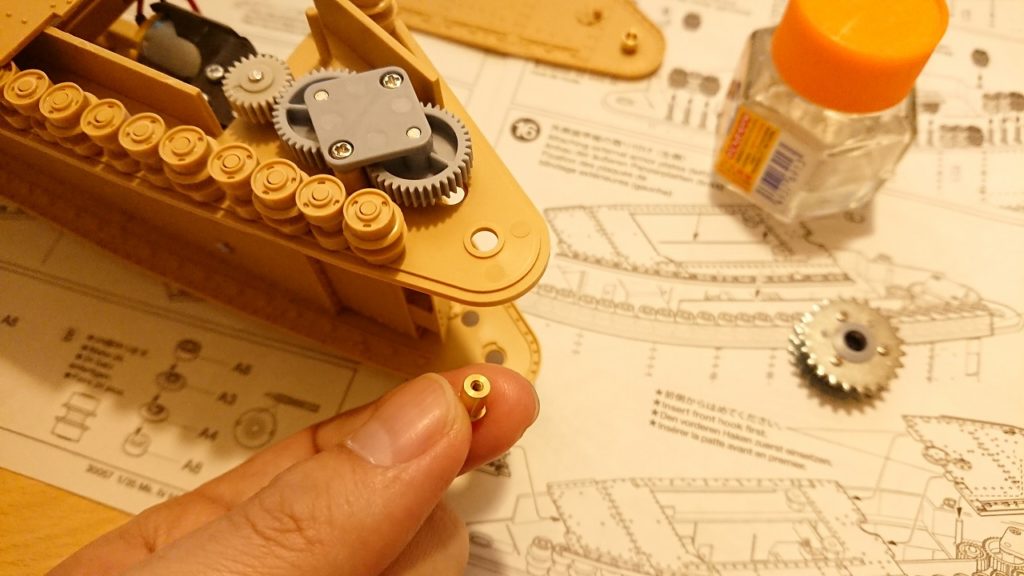
まず、ギアを取り付けるための軸を取り付けます。
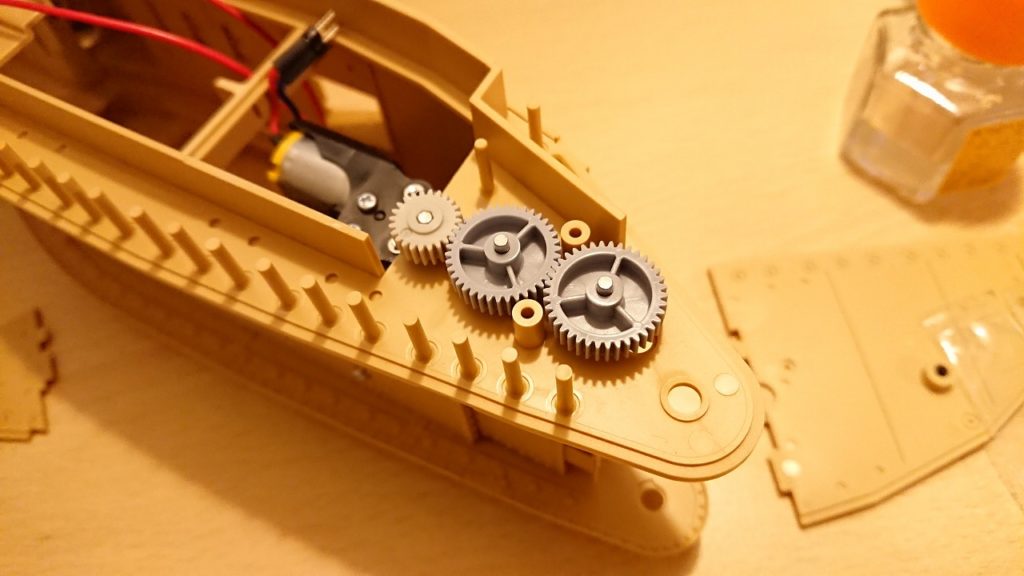
ギヤボックスから出ているギヤより少し大きいギヤを2つ取り付けます。
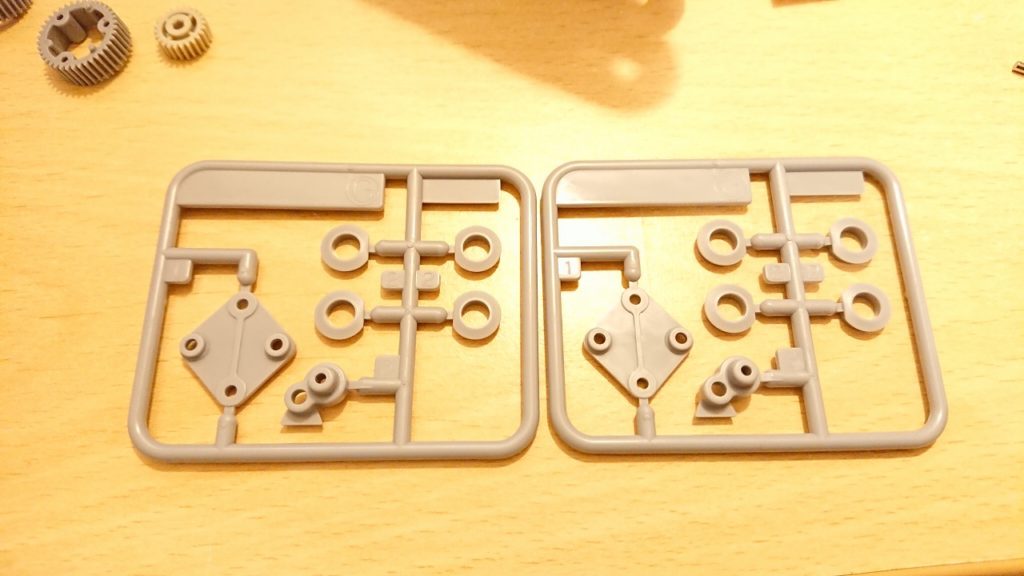
こちらはギヤ回りのランナー”G”です。ギヤが脱輪しないようにするために、菱形の留め具を使います。
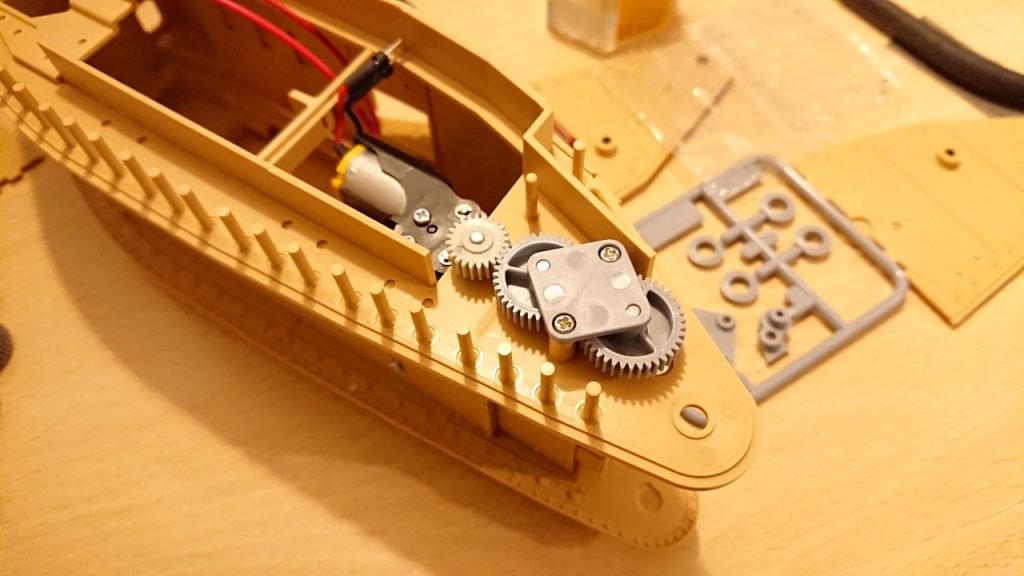
こんな感じで固定します。ちなみにギヤボックスから出ているギアは摩擦力が強いため固定しなくても外れにくくなっています。
ご存知の通りマークⅣの転輪は相当な数があります。
形状は2種類あり、それらを組み合わせて片側26セットの転輪を作成しなくてはなりません…さすがに多いですね。
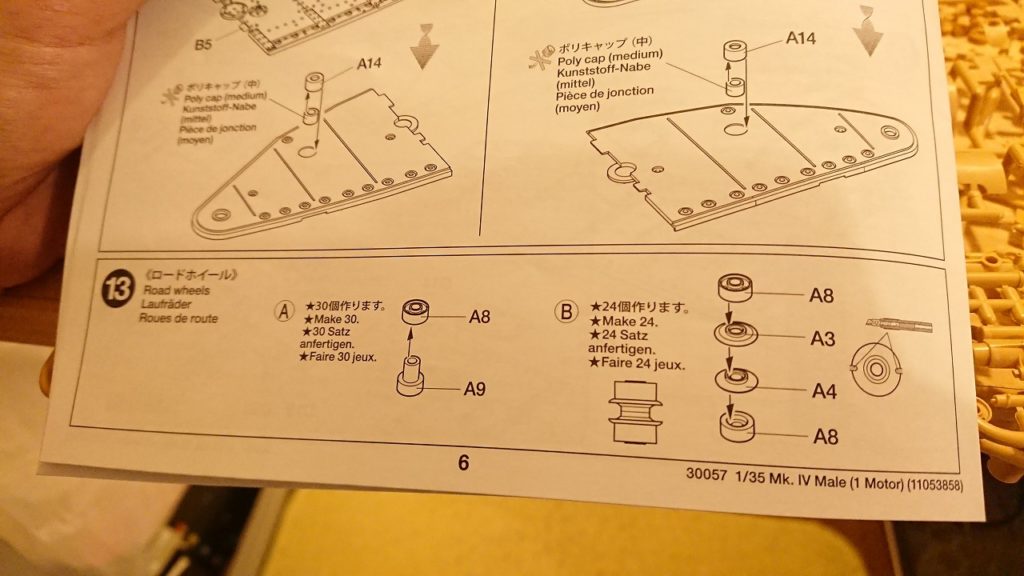
Aの転輪はダンベルのような形をしており、Bの転輪はA転輪の真ん中にお皿のような形の物が2つついています。多分履帯がずれないようにするための出っ張りだと思います。

こちらがランナーから切り出したAの転輪パーツたちです。

先のパーツを接着剤でくっつけて、形だけは完成しました。大量のダンベルです。あとは一変にやすりでバリを削ればOKです。
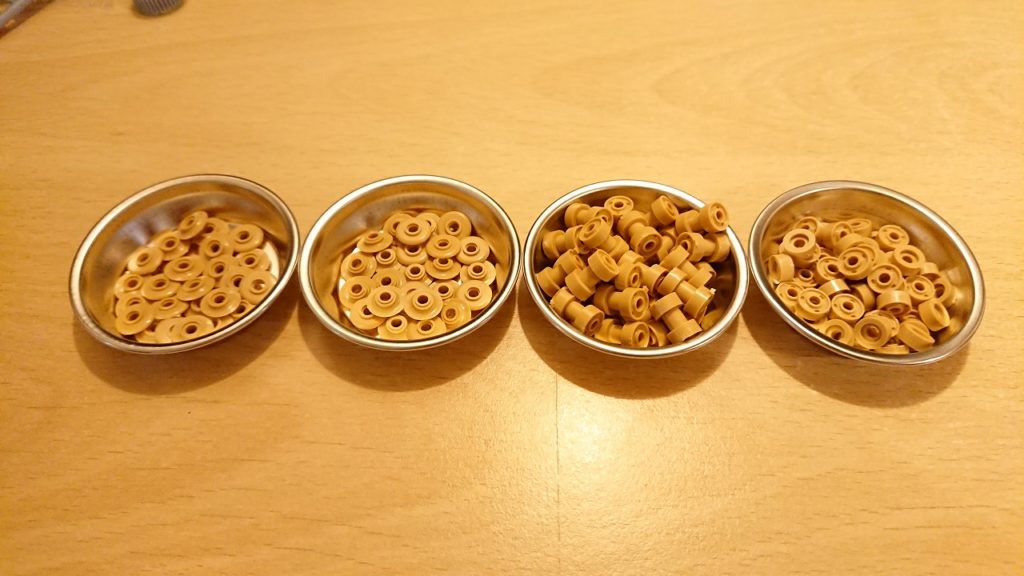
細かいパーツの数が増えてきたので、万年塗装皿(小型)にパーツを入れて仕分けしました。これ便利ですね。

履帯を少しだけ取り出して、あてがってみました。バリが出ているところはちょうど履帯のレールに当たる部分になっています。このままでは走るときにガタガタしてしまうかもしれないので、バリをやすりで削ります。
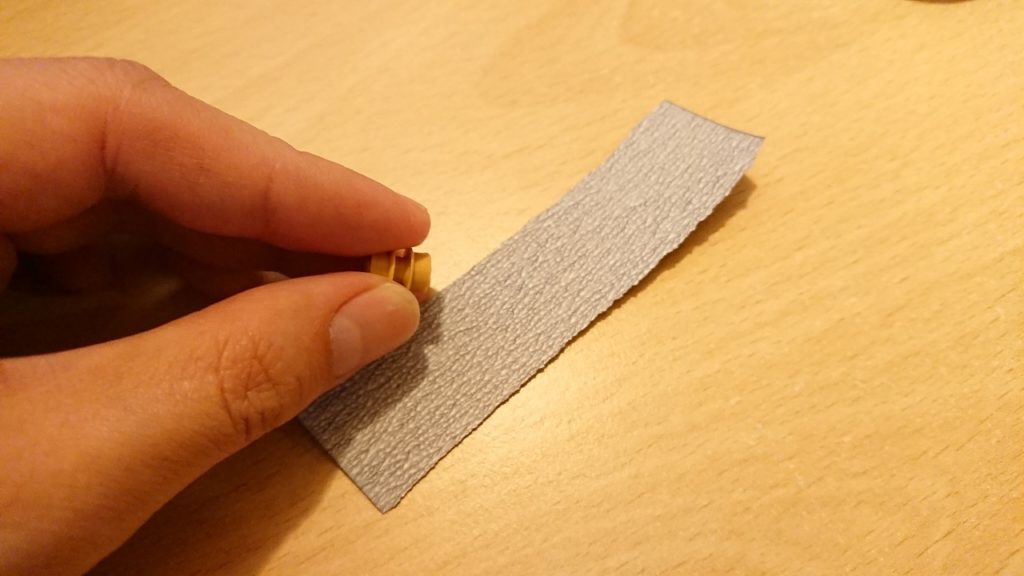
すべての転輪をやすりで削っていきます。使ったのはTAMIYAの600番のやすりです。表面が滑らかになれば問題ないと思います。※この部分は隠れて見えなくなる部分なので多少雑でも問題ないでしょう(笑)

こんな感じで完成です!数は多いですが単純作業なので意外と早くできました。
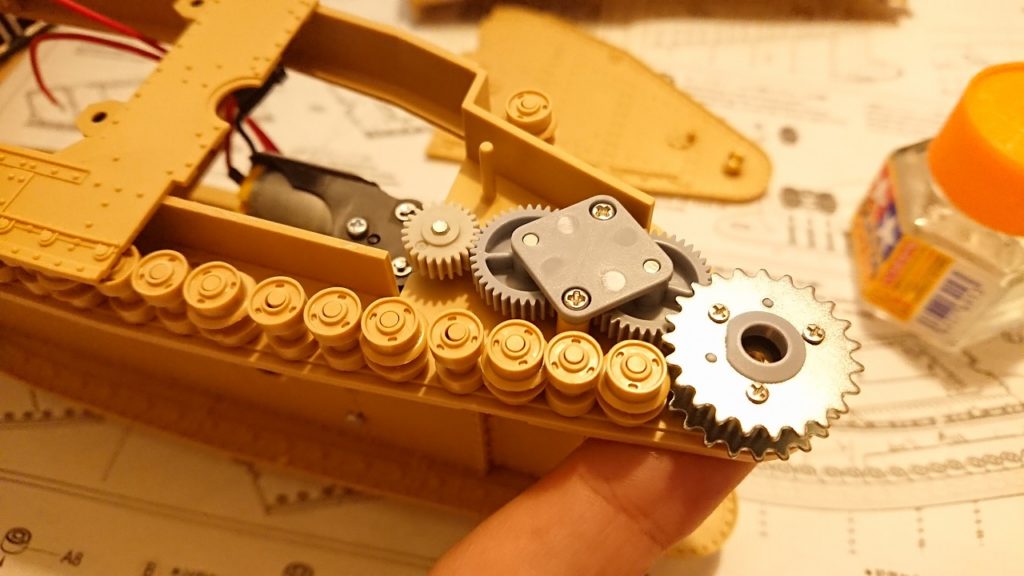
ドライブホイールを作成していきます。ドライブホイールとは名前の通り、戦車を走らせるためのホイールの事で、マークⅣは車体の一番後ろの車輪がドライブホイールになります。

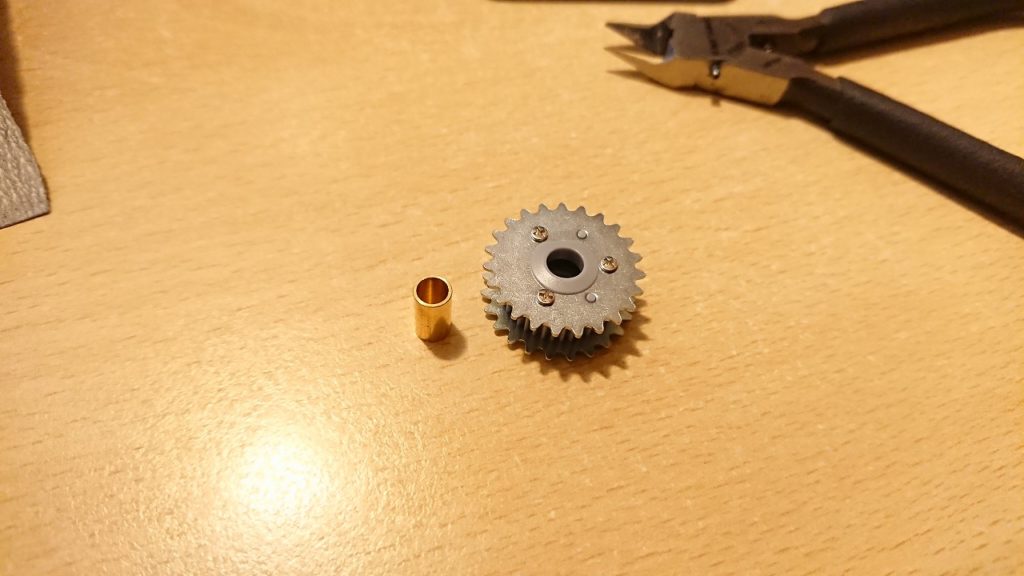
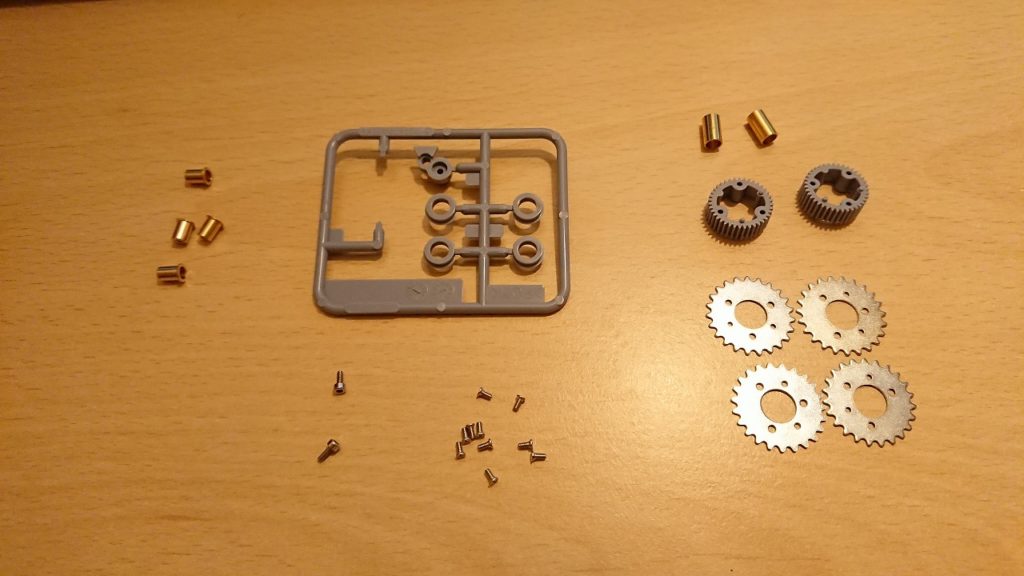
履帯に噛み合わせる歯車と軸、ネジが小袋に分けられています。

履帯に噛み合わせる歯車は金属でできており、穴が5つ開いています。これはネジ止め用の穴3つと、位置合わせ用の穴2つです。位置合わせ用の穴が2つなのは、ネジ穴と間違えないようにするための”馬鹿よけ(foolproof設計)”ですかね?

ネジを取り付けるとこんな感じです。

先ほど紹介した”G”のランナーからドライブホイールの軸受けを切り出します。
軸受けをドライブホイールに取り付けました。さらに、その中にドライブホイールのパイプ(金属製)を差し込みます。
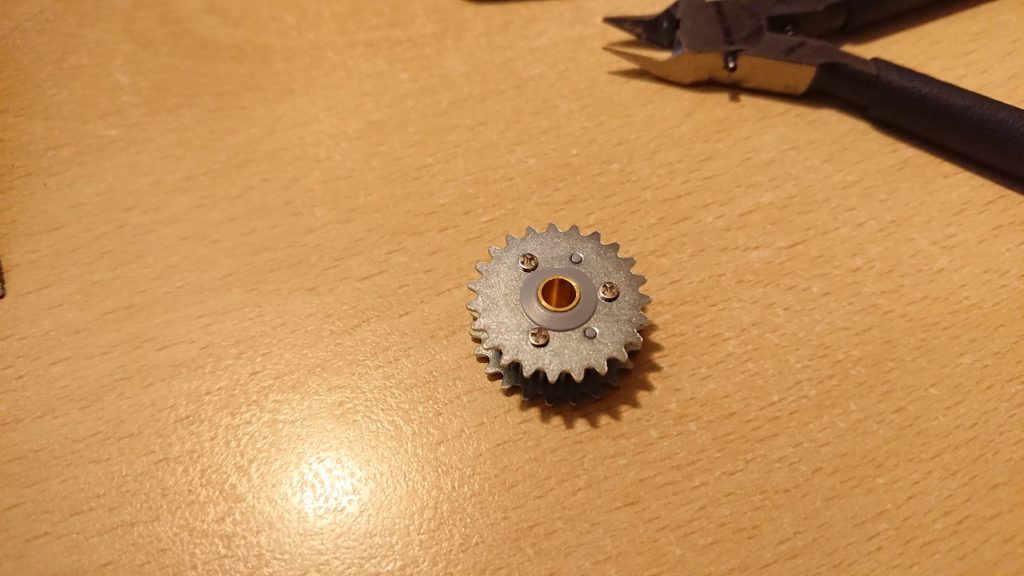
こんな感じになりました。
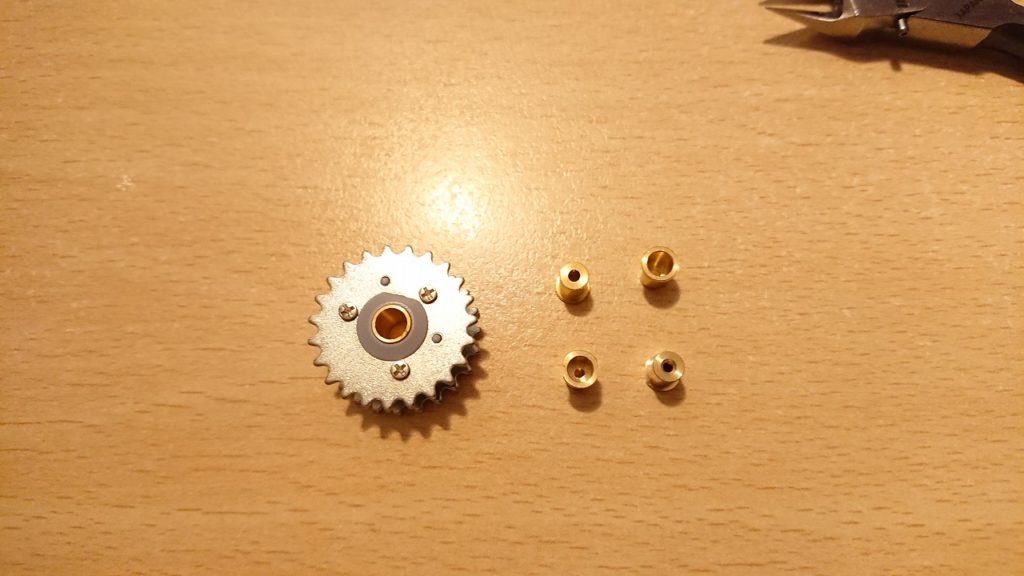
あとは車体に取り付けるためのネジ(スプロケットシャフト)を用意します。スプロケットシャフトは2種類あり、スプロケットシャフトA(DA4)とスプロケットシャフトB(DA5)で形状が若干異なるので注意する必要があります。

※上がDA4、下がDA5。DA5は円の左右が欠けている。
このドライブホイールは後程マークⅣの側面装甲を取り付けるとき配置します。
いよいよ履帯の作成に入ります。履帯はもちろん可動履帯で、プラスチック製です。

履帯はこのように小袋に入っています。ランナーから切り出す必要がないため、そのままくっつけていけば完成します。
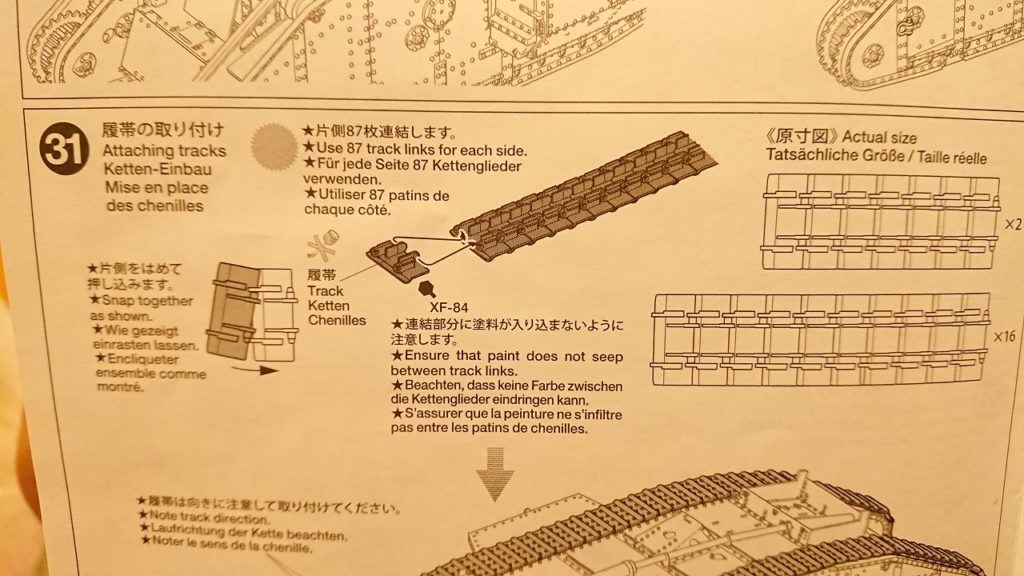
連結は簡単です。まず片方の履帯の穴にもう片方の履帯の出っ張りを引っ掛けます。
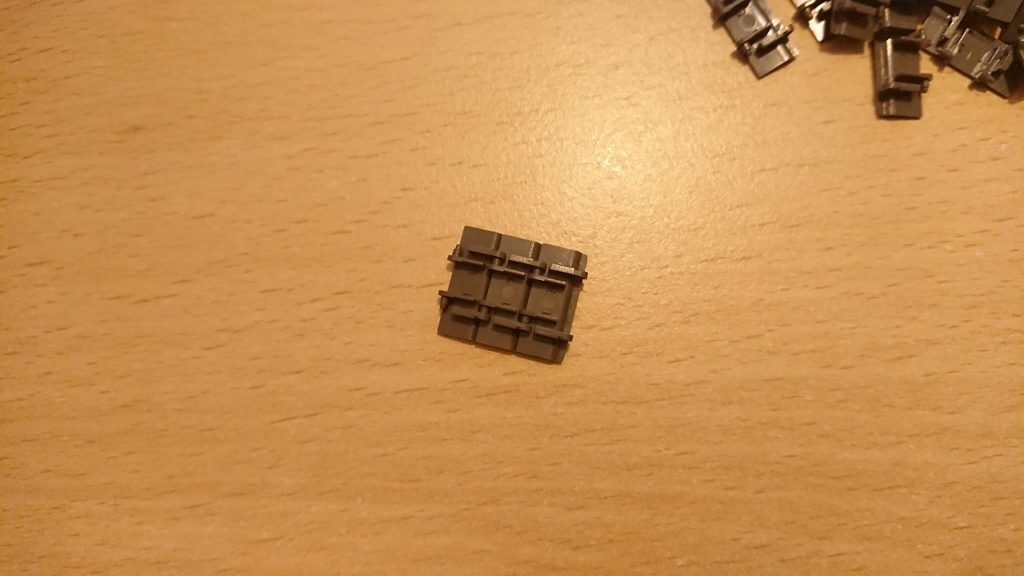
そのあと少し力を入れて、もう片方の穴に出っ張りを入れれば連結できます。パチッという音がして綺麗にはまりますが、力を入れすぎると穴や出っ張りが破損する恐れがあるので注意して付けていきます。
途中で気が付いたのですが、綺麗な履帯とバリが出てしまっている履帯がありました。

※左が綺麗な履帯、右がバリのある履帯
バリのある方は連結した時スムーズに動かなくなってしまったのでバリを取り除かないとダメですね。とりあえずバリがない綺麗な履帯だけくっつけていきます!

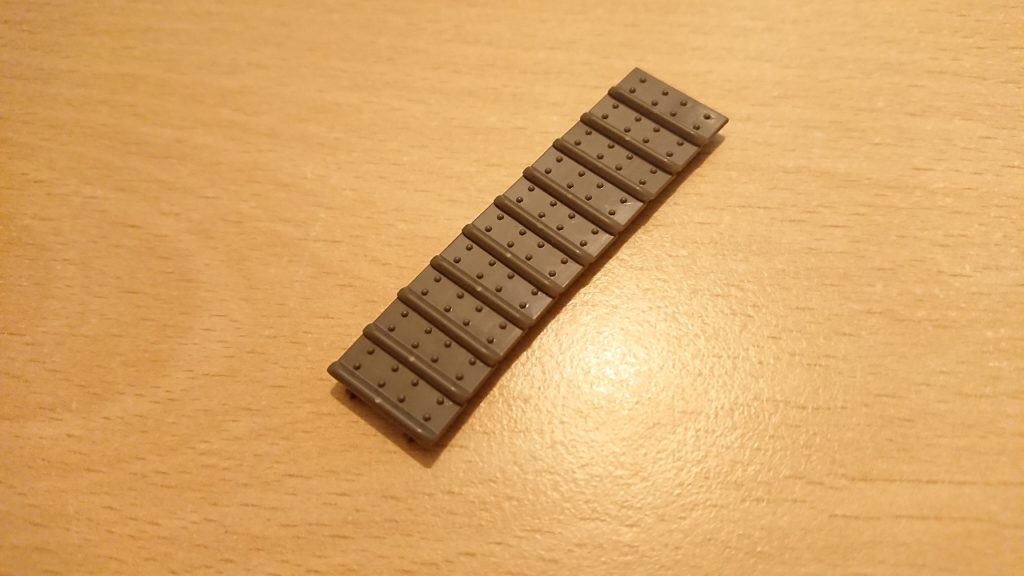
綺麗な履帯の連結が完了しました!残っているのはバリのある履帯です。結構な枚数ありましたね…
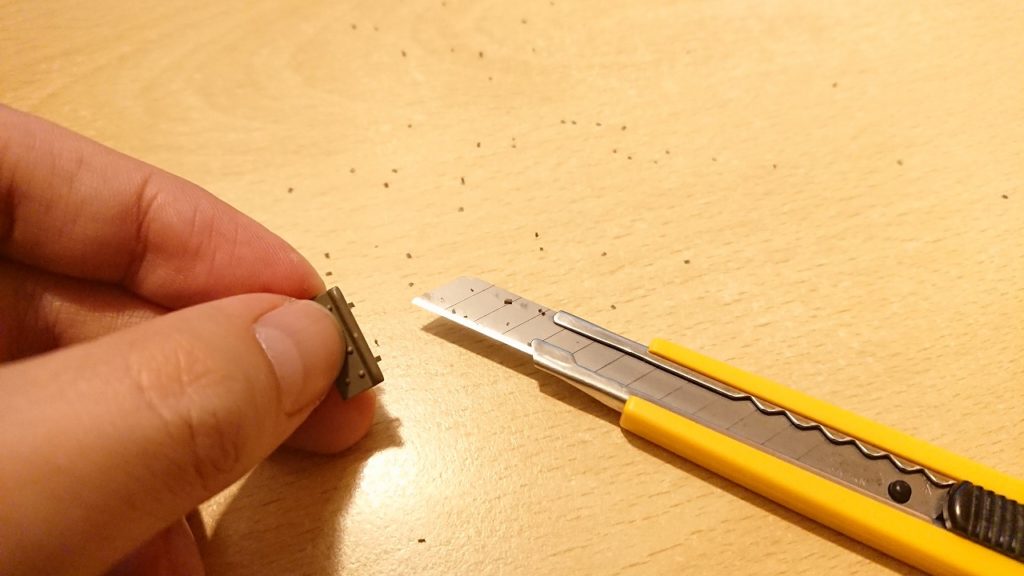
バリをカッターで取り除いてみました。結構枚数があるので結構ゴミが出てしまう…
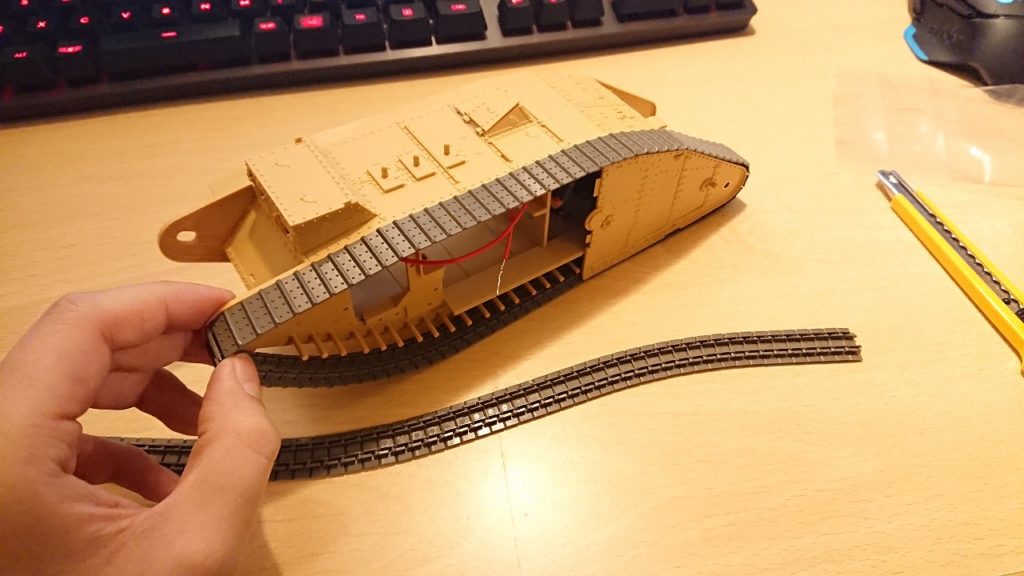
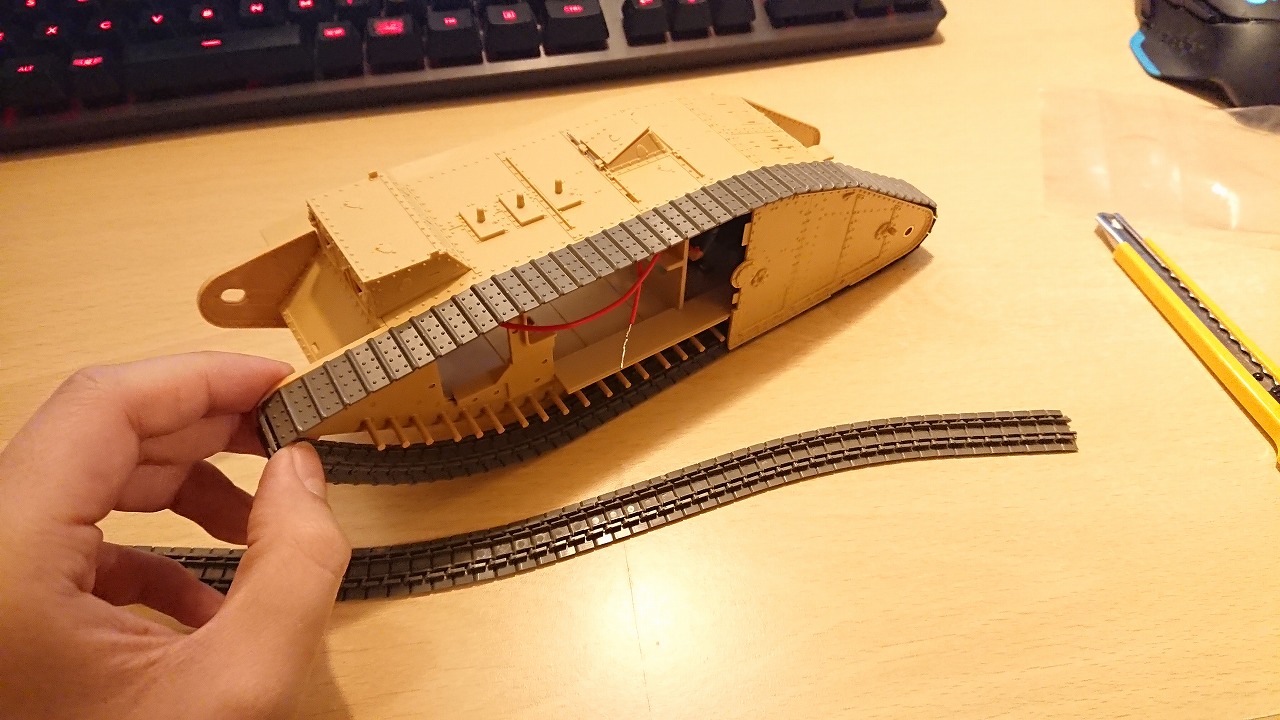
片側87枚の履帯作成が完了しました!マークⅣの車体にあてがうとこんな感じです。
では最後に転輪と側面装甲を取り付けていこうと思います!

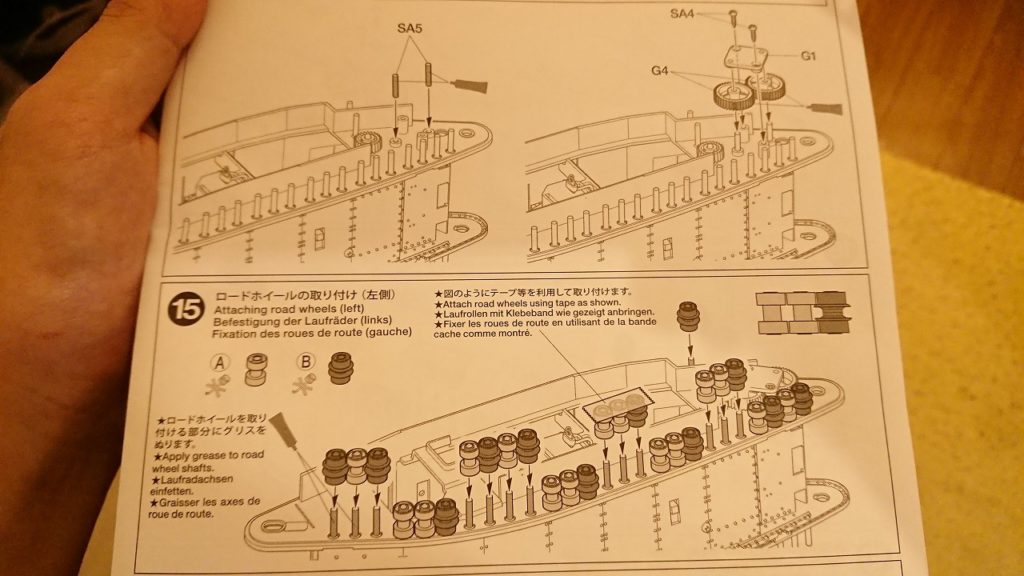
まず説明書通りに、先ほど作成したAの転輪とBの転輪を取り付けました。
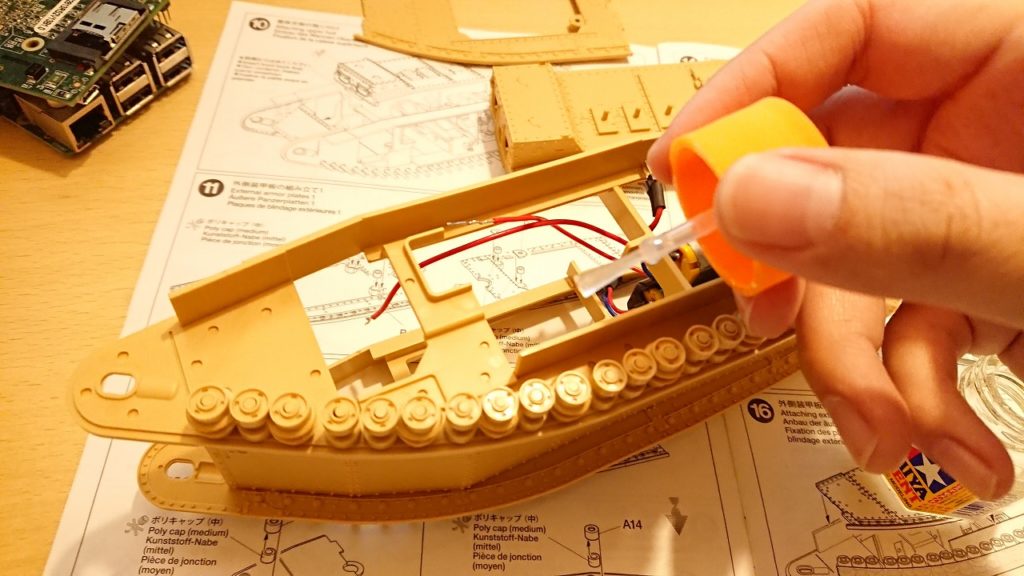
接着剤を使って側面装甲を取り付けます。
取り付けるとこんな感じです。この中央付近の側面装甲は接着剤で取り付けるため、一度付けたら外せません。
今度は後方の側面装甲をつけていきます。この部分にはドライブホイールが内蔵されるので、ドライブホイールも同時に取り付ける必要があります。
このようにスプロケットシャフトB(DA5)(円が欠けている方)を内側に向かって差し込みます。
そのうえにドライブホイールを乗せて、ギヤと噛み合うようにします。
そして、側面装甲とスプロケットシャフトA(DA4)を上からかぶせます。
こんな感じ

上から六角レンチでしっかりと止めればOKです。ちなみにこの車体後部の側面装甲は接着剤を使わないので、後から取り外すことができます。そのため、ギヤなどが入っている部分のメンテナンスを行うことができます。
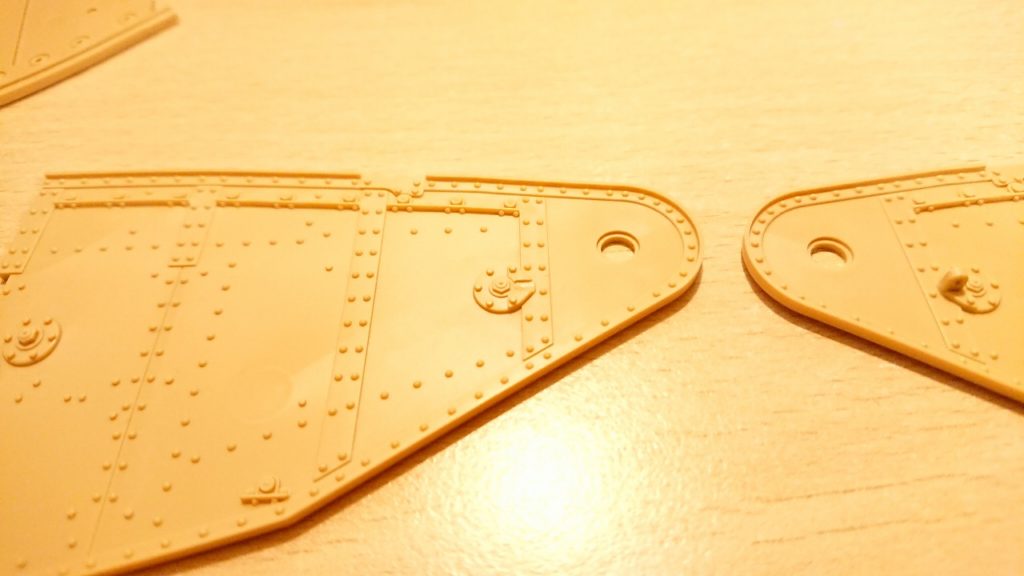
車体の一番前の装甲を取り付けていきます。ここには後程アイドラーホイールが入ります。
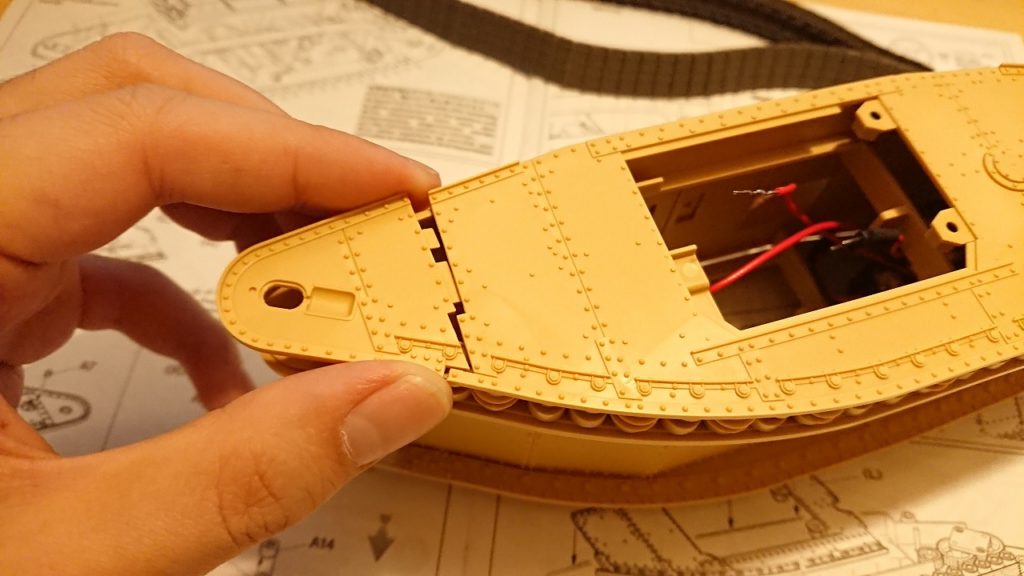
ここも中央の側面装甲と同じで、接着剤を使って取り付けるため一度付けたら修正できません。
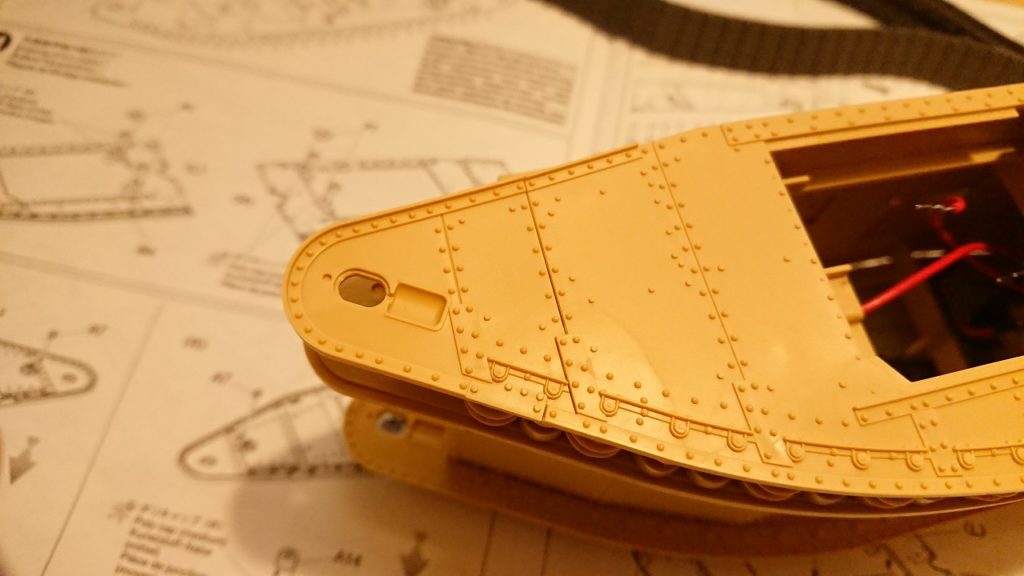
こんな感じでつきます。
逆側も同じように作成します。先ほどまでとほとんど同じ手順なので説明は省略します。
アイドラーホイールとはドライブホイールの逆側にある履帯の張り具合を調整するホイールの事で、マークⅣの場合は車体前方に飛び出している部分の内部に存在するホイールのことです。で、そのアイドラーホイールを作成するのですが、パーツ構成はドライバーホイールと同じです。
で取り付け方も完全にドライブホイールと同じなので説明と写真は省略させてもらいます(笑)。

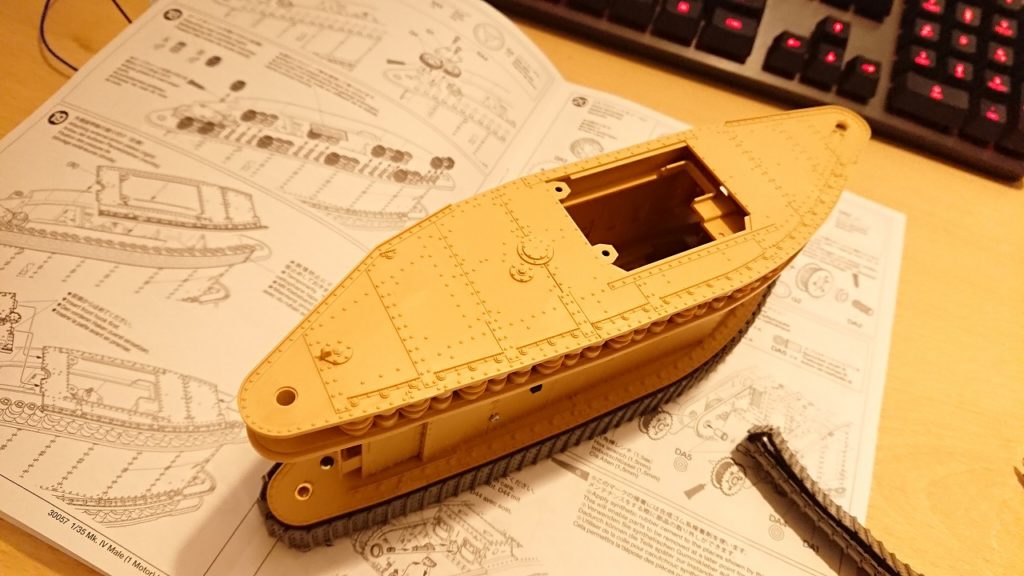
こんな感じで取り付け完了です!履帯も付ければ足回りは完成です!
というわけで足回りが完成しました!
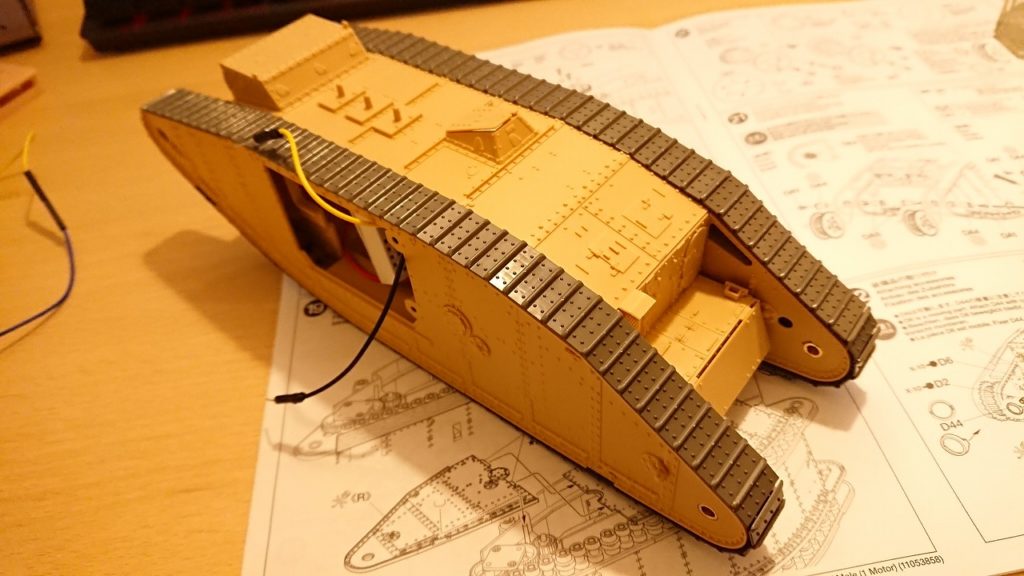
やはり戦車といえば履帯!マークⅣの場合だと特に履帯の存在感が大きいので、足回りが完成すると迫力が出ますね!
今回は電子工作のないただのプラモデル作成でした!作業としてはサクッと終わったのに、前回の記事より長い説明になってしまいました(汗)。写真が多いと全体的に長くなってしまいますね。
今回はこれで終わりにしようと思います!次回は実際にマークⅣを走行させる内容にしようと思っています!(いつやるかは未定です)ではでは~
・続き↓
・前回↓
タミヤ 1/35 マークIV カメラ付きラジコン化計画 (その13) ~サーボモータを制御する~
・一覧↓
カメラ付きラジコン化計画シリーズ
more
2021/07/11
 ~砲塔の制御~")
2021/05/04
more
")
2026/07/09
 豊平")
2026/05/11

2026/04/25
more
more

2026/05/12
![[Chitubox]サポート材の自動設定で3Dプリンタの高さ制限超えた時の対処法](https://shigeru-orikura.com/wp-content/uploads/2026/05/chitubox_005sd-blogsize-150x150.jpg "[Chitubox]サポート材の自動設定で3Dプリンタの高さ制限超えた時の対処法")
2026/05/03

2026/04/26
 ~サーボモータの追加~")
~主砲部分や前照灯の作成~")
~ドライブホイールの作成~")
~車高調整と車体作成~")
 シティ オフロード消防車 60393 を作ってみた")
 スピードチャンピオン ケーニグセグ ジェスコ 76900 を作ってみた(その2)")
 スピードチャンピオン ケーニグセグ ジェスコ 76900 を作ってみた(その1)")



